

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Determine the mobility of the 8-link robot manipulator and the 4-link landing gear mechanism shown in Figure 1 using Kutzbach criteria. Note that C,
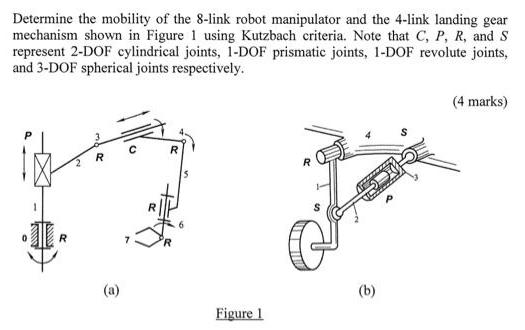
Determine the mobility of the 8-link robot manipulator and the 4-link landing gear mechanism shown in Figure 1 using Kutzbach criteria. Note that C, P, R, and S represent 2-DOF cylindrical joints, 1-DOF prismatic joints, 1-DOF revolute joints, and 3-DOF spherical joints respectively. R 3 R R Figure 1 R (b) (4 marks)
Step by Step Solution
There are 3 Steps involved in it
Step: 1
To determine the mobility of the given 8link robot manipulator and 4link landing gear mechanism using the Kutzbach criteria we need to count the numbe...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Engineering Mechanics - Dynamics
Authors: R. C. Hibbeler
11th Edition
132215047, 978-0132215046