

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
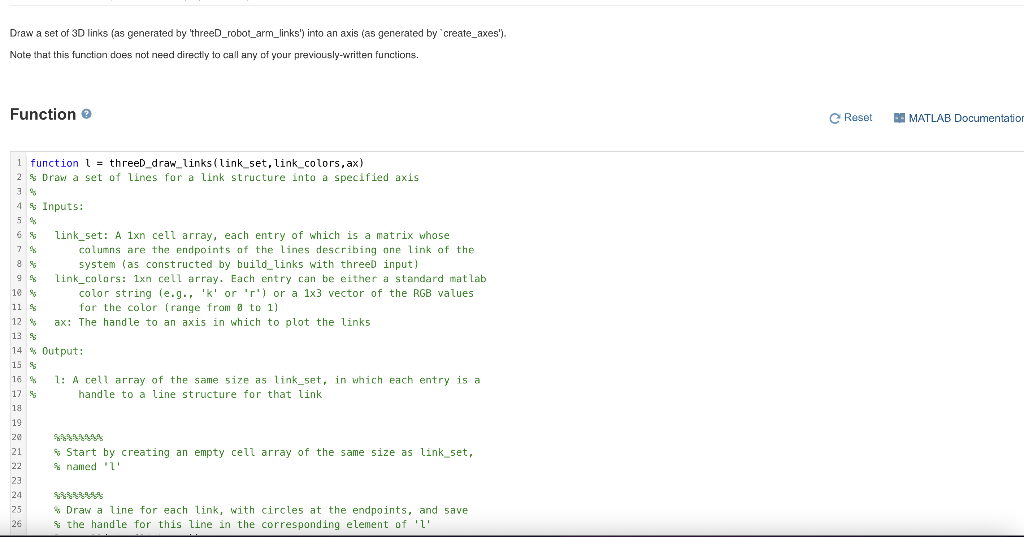
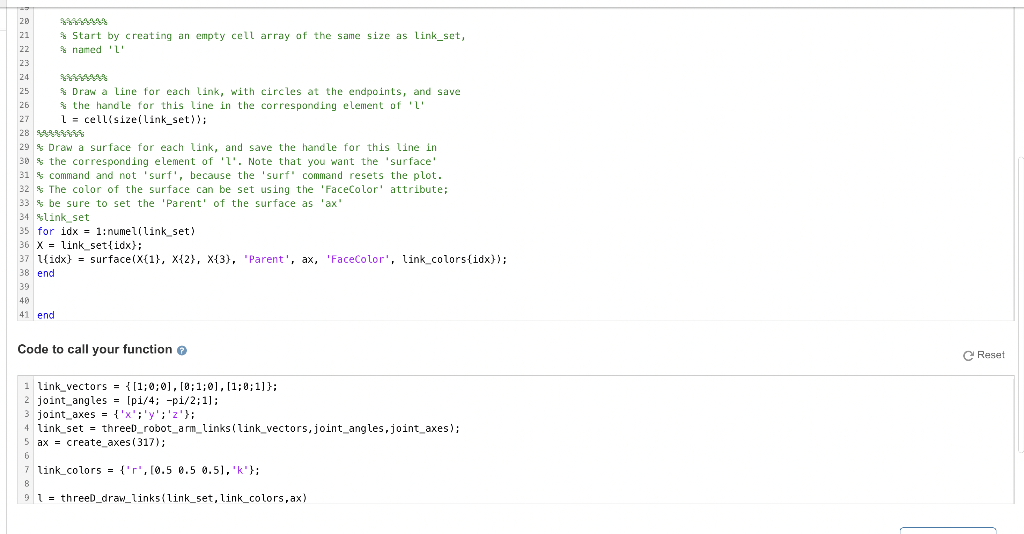
Draw a set of 3D links (as generated by threeD_robot_arm_links) into an axis (as generated by 'create_axes'). Note that this function does not need directly
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Administration The Complete Guide To Dba Practices And Procedures
Authors: Craig S. Mullins
2nd Edition
0321822943, 978-0321822949