

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Example 14.10. For the unicycle model, x y = = cos(0)v sin(0)v = let T1 be the driving force and T2 be the steering
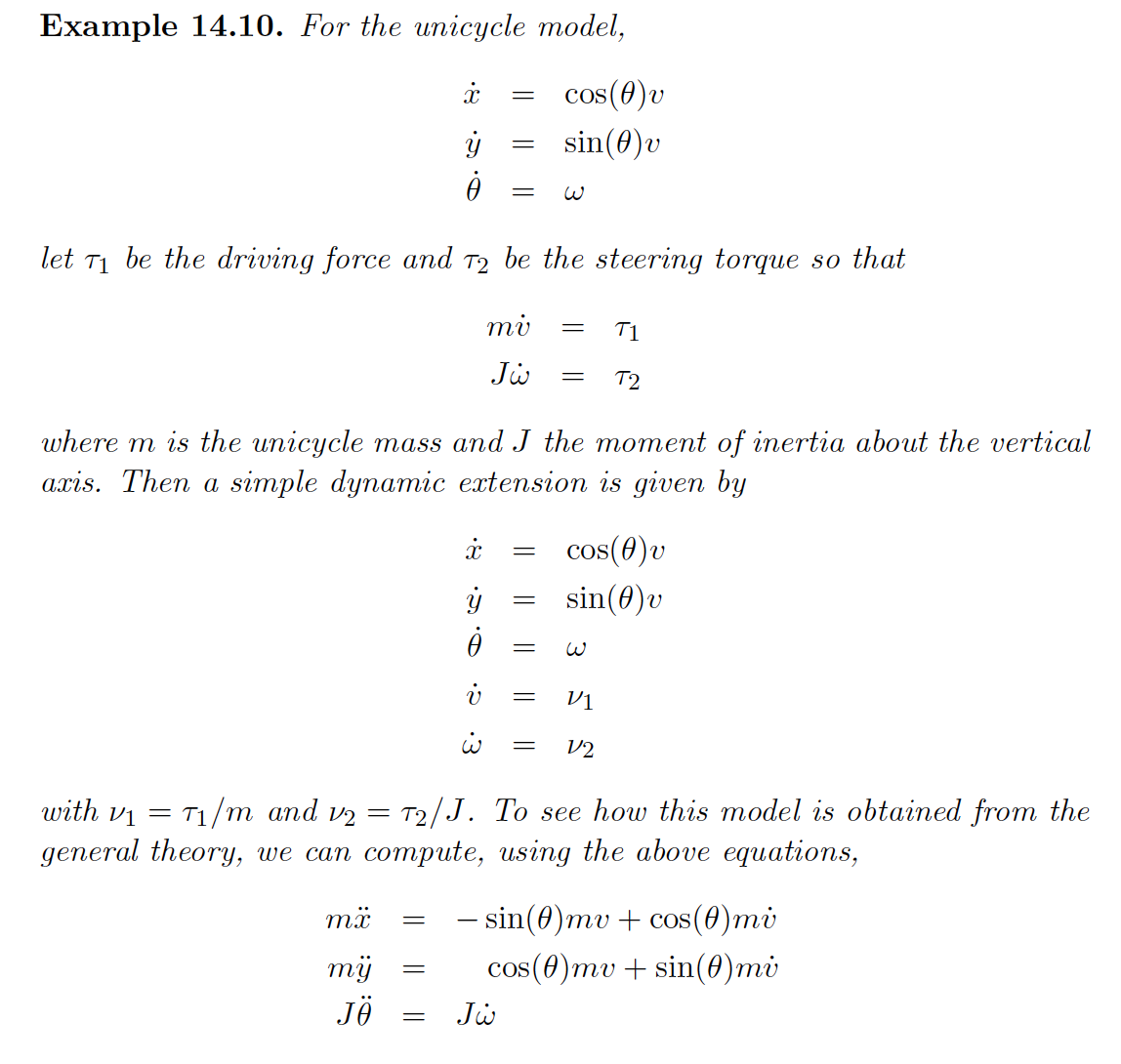
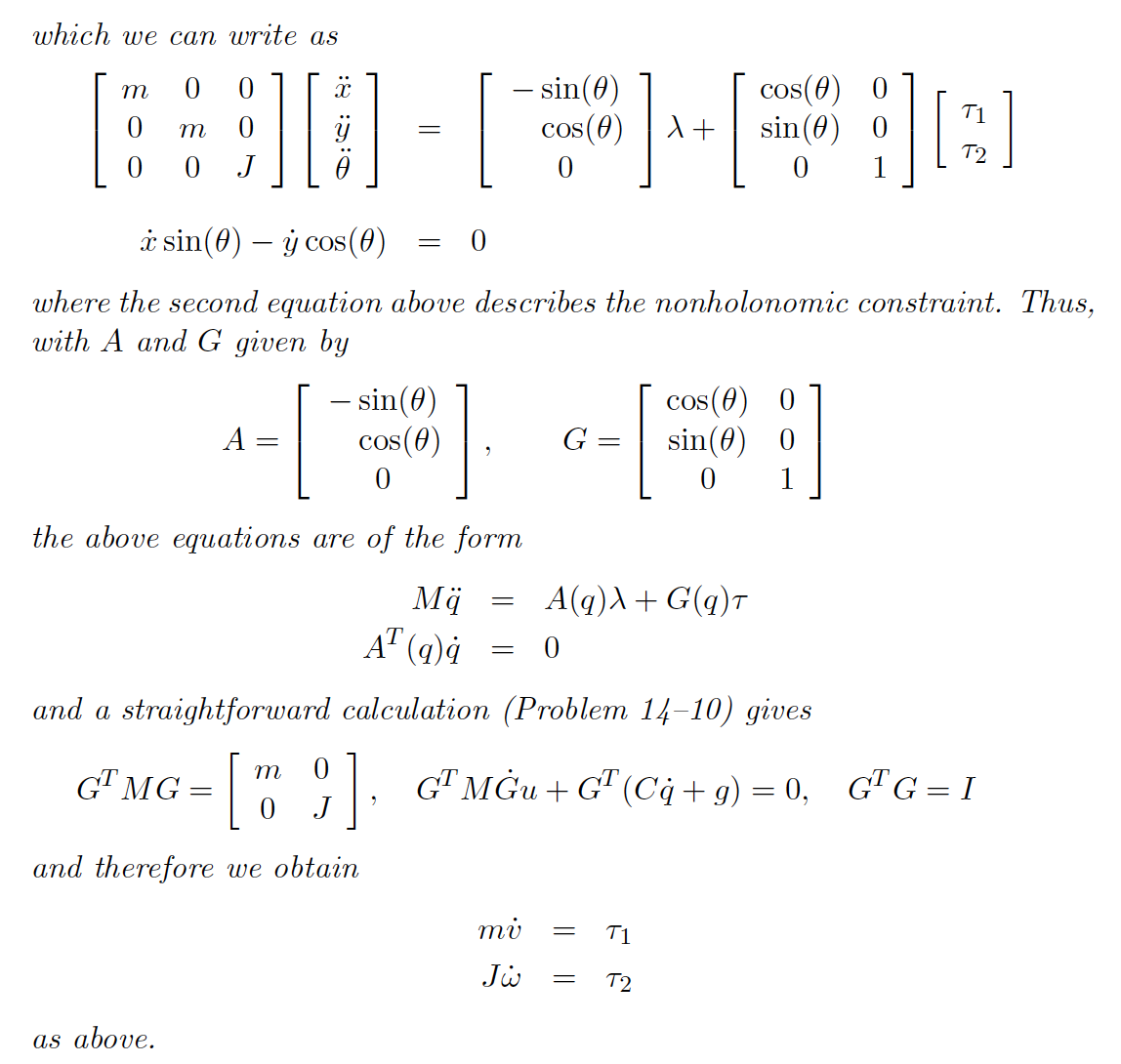

Example 14.10. For the unicycle model, x y = = cos(0)v sin(0)v = let T1 be the driving force and T2 be the steering torque so that mv Jw = T1 = T2 where m is the unicycle mass and J the moment of inertia about the vertical axis. Then a simple dynamic extension is given by x = cos(0)v sin(0)v v = = w = V1 with V1 = V2 = T1/m_and v2 = T2/J. To see how this model is obtained from the general theory, we can compute, using the above equations, mx = - sin(0) mv + cos(0)mi mi J = = Jw cos(0)mv+sin(0)mi which we can write as sin(0) cos(0) 0 T1 T2 1 cos(0) + sin(0) 0 80-7-8IN J = * sin(0) - y cos(0) = 0 where the second equation above describes the nonholonomic constraint. Thus, with A and G given by sin(0) cos(0) 0 A = cos(0) 0 G = sin(0) 0 0 1 the above equations are of the form M AT (a) = A(q) + G(q)T 0 = and a straightforward calculation (Problem 14-10) gives GT MG= m 0 |[" } ], GT Mu + G (Cq +9)=0, GG=I J and therefore we obtain mi = T1 Jw = T2 as above. 14-10 Verify the calculations in Example 14.10.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Engineering Mechanics Statics
Authors: Russell C. Hibbeler
11 Edition
9780132215091, 132215004, 132215098, 978-0132215008