

Question
Example shows the forward kinematics of Universal Robots' UR5 6R robot arm. Fixed parameters are given as follows: W = 109mm, W = 82mm,
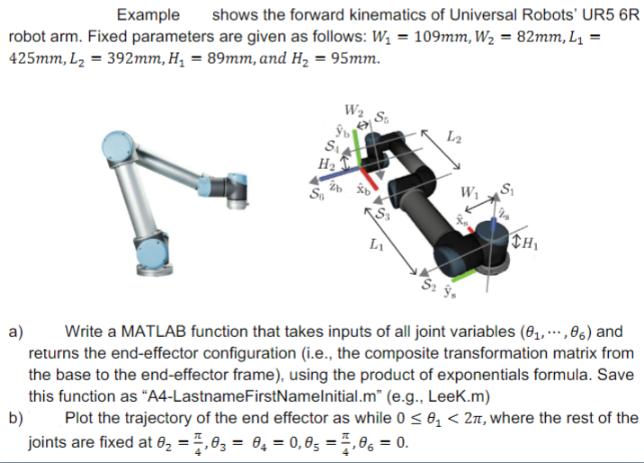
Example shows the forward kinematics of Universal Robots' UR5 6R robot arm. Fixed parameters are given as follows: W = 109mm, W = 82mm, L = 425mm, L = 392mm, H = 89mm, and H = 95mm. W 9b SA 2b S LA L S a) Write a MATLAB function that takes inputs of all joint variables (0,...,06) and returns the end-effector configuration (i.e., the composite transformation matrix from the base to the end-effector frame), using the product of exponentials formula. Save this function as "A4-LastnameFirstNamelnitial.m" (e.g., Leek.m) b) Plot the trajectory of the end effector as while 0 8 < 2, where the rest of the joints are fixed at 8,03 = 04 = 0,05 = =,06 = 0.
Step by Step Solution
3.45 Rating (148 Votes )
There are 3 Steps involved in it
Step: 1
The image you sent shows a closedend thickwalled cylinder with an inner diameter of 50mm and an oute...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elements Of Chemical Reaction Engineering
Authors: H. Fogler
6th Edition
013548622X, 978-0135486221