

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
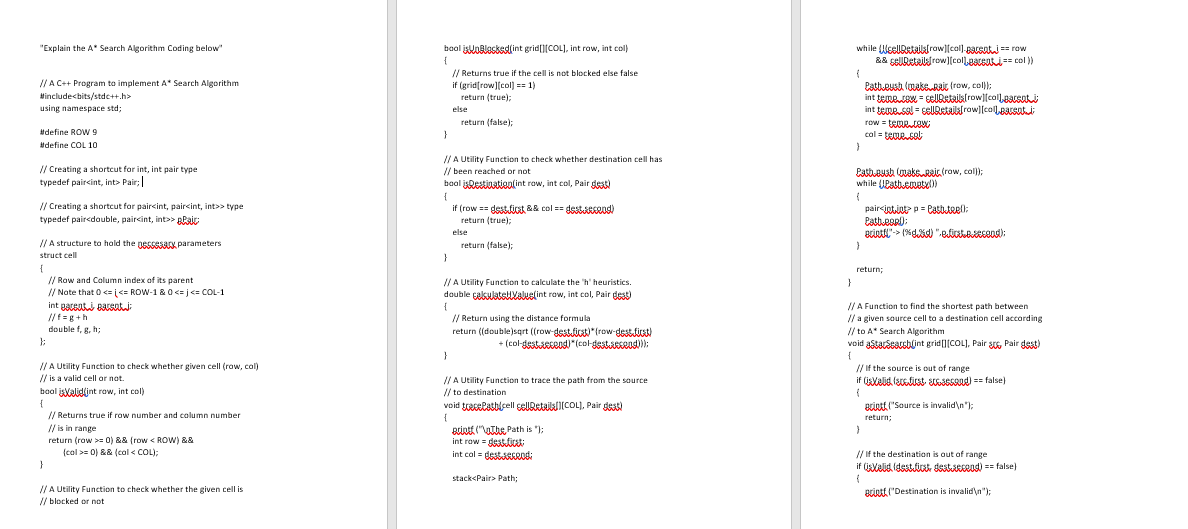
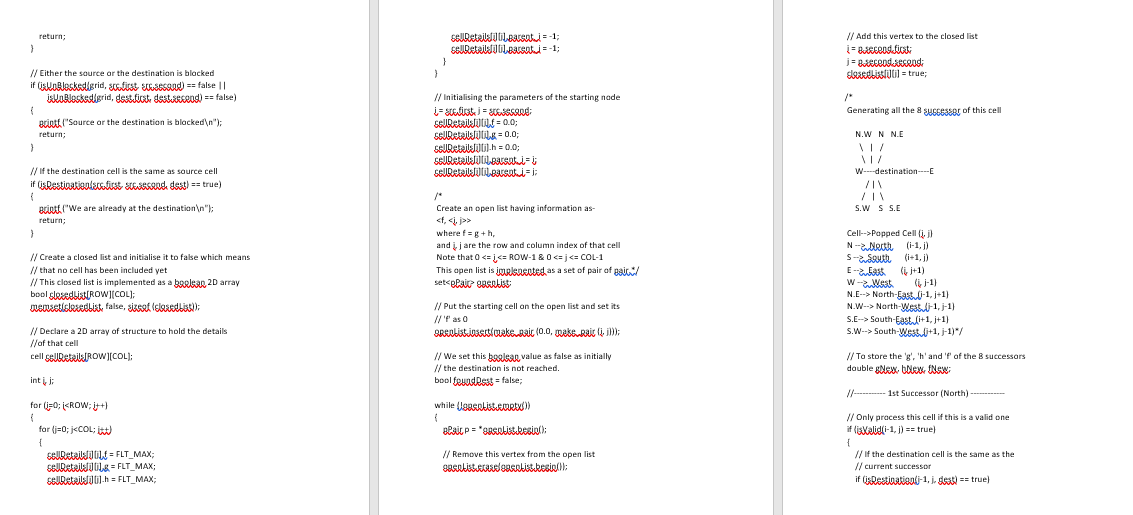
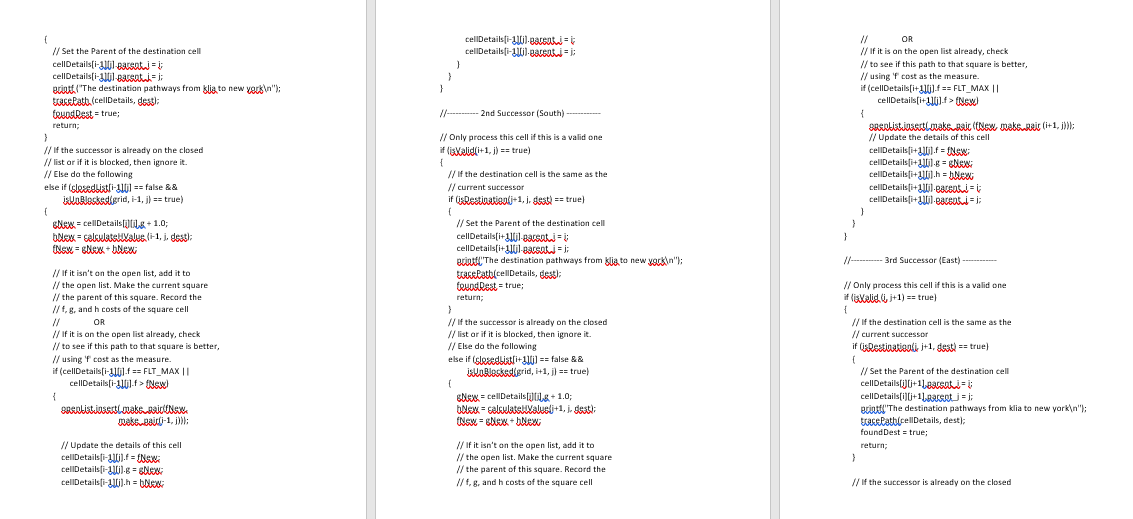
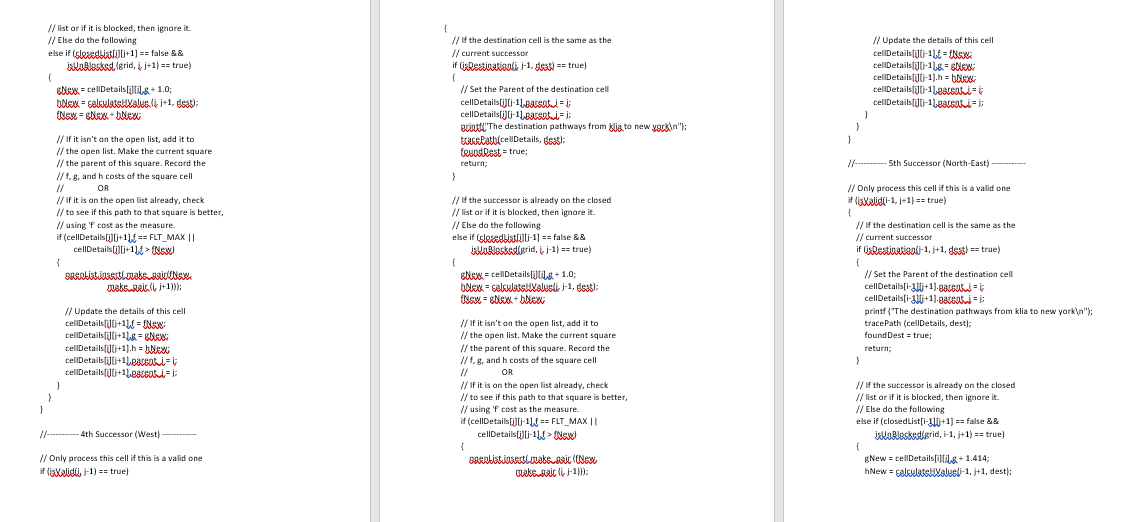
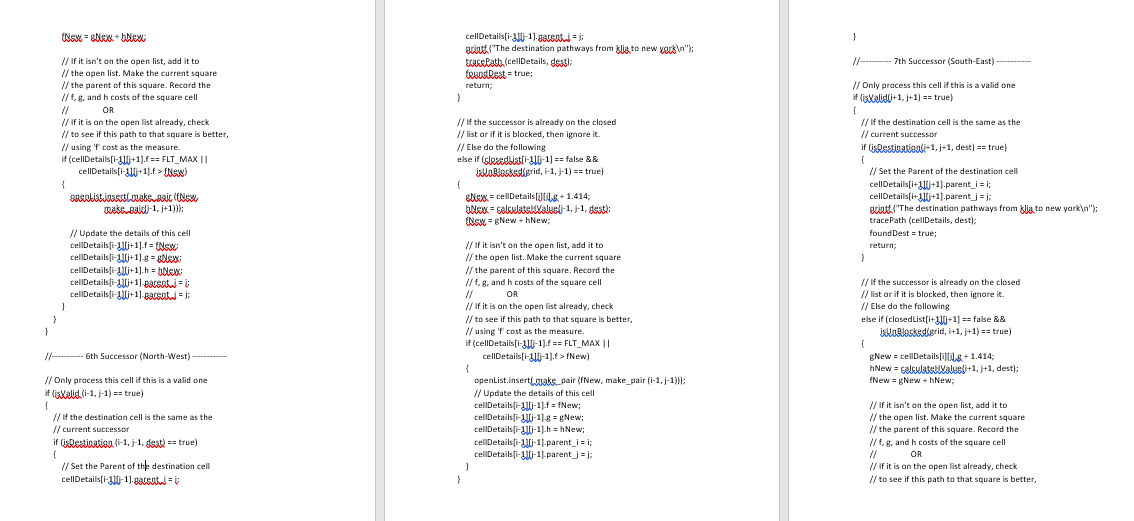
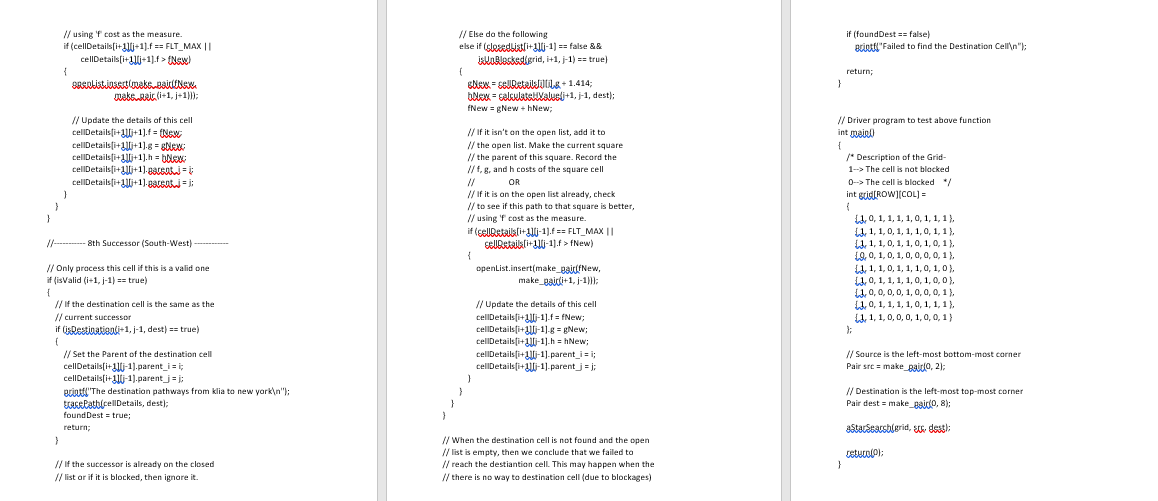
Explain the A' Search Algorithm Coding below while Weeldetails[raw][coll.Barsat = row && seu Detailstrow][collessati == col) // A C++ Program to implement A* Search Algorithm
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Postgresql 10 Administration Cookbook Over 5 Effective Recipes For Database Management And Maintenance In Postgresql 10
Authors: Simon Riggs ,Gianni Ciolli
4th Edition
1788474929, 978-1788474924