

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
FConsider a cylindrical manipulator. It has three joints and each joint is actuated by a DC motor. For simplicity, it is assumed that the
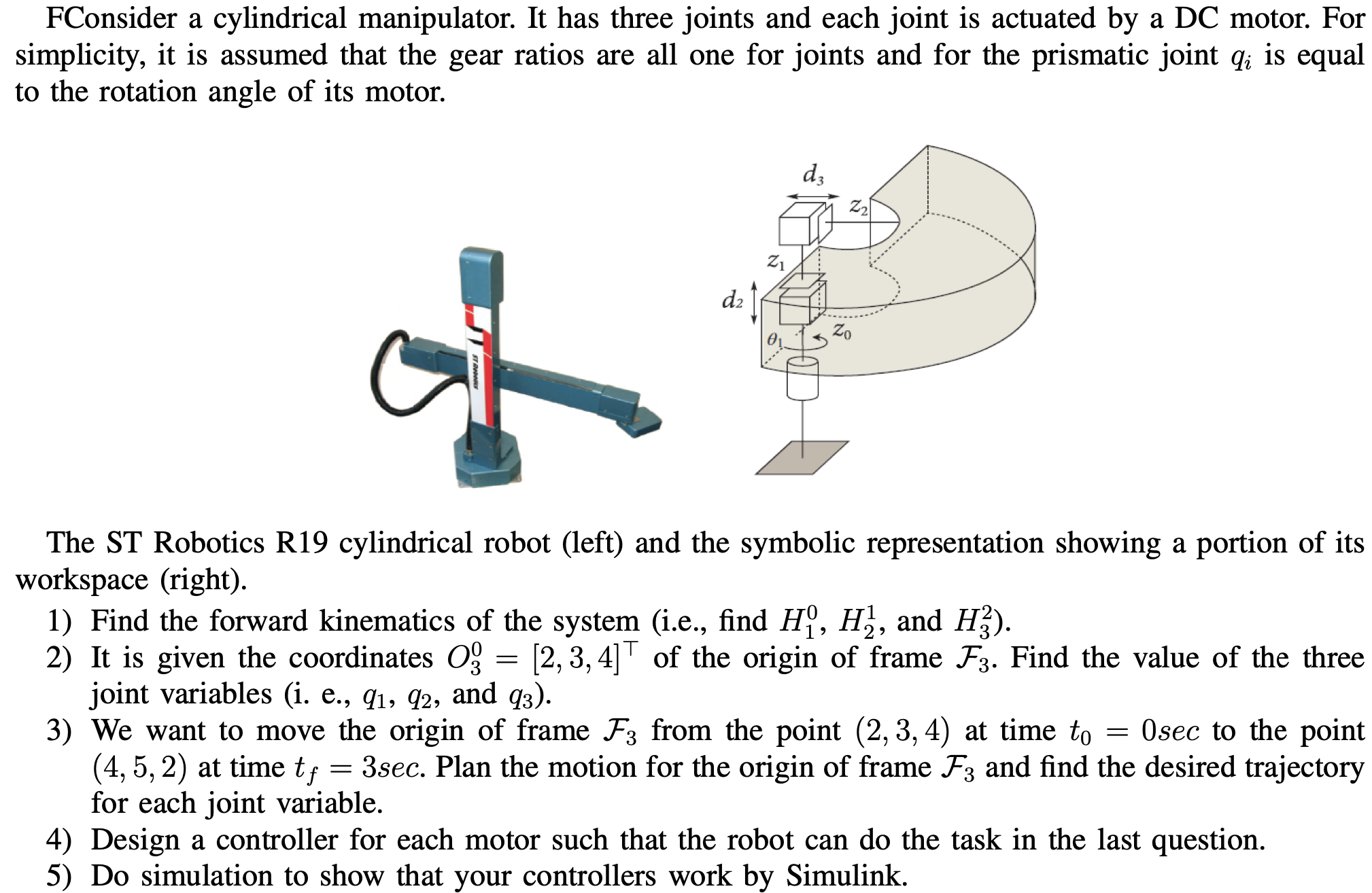
FConsider a cylindrical manipulator. It has three joints and each joint is actuated by a DC motor. For simplicity, it is assumed that the gear ratios are all one for joints and for the prismatic joint q; is equal to the rotation angle of its motor. d2 Z1 d3 Z2 Zo The ST Robotics R19 cylindrical robot (left) and the symbolic representation showing a portion of its workspace (right). 1) Find the forward kinematics of the system (i.e., find H, H, and H). 2) It is given the coordinates 033 = [2,3,4] of the origin of frame F3. Find the value of the three joint variables (i. e., 91, 92, and 93). 3) We want to move the origin of frame F3 from the point (2, 3, 4) at time to = Osec to the point (4, 5, 2) at time tf = 3sec. Plan the motion for the origin of frame F3 and find the desired trajectory for each joint variable. 4) Design a controller for each motor such that the robot can do the task in the last question. 5) Do simulation to show that your controllers work by Simulink.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
System Dynamics
Authors: William Palm III
3rd edition
73398063, 978-0073398068