

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
3. Consider the following diagram OFF {0} world Fixed camera (F) FEB CEB REC {R} Robot OER Figure 2: Multiple 2D frames Object {B}
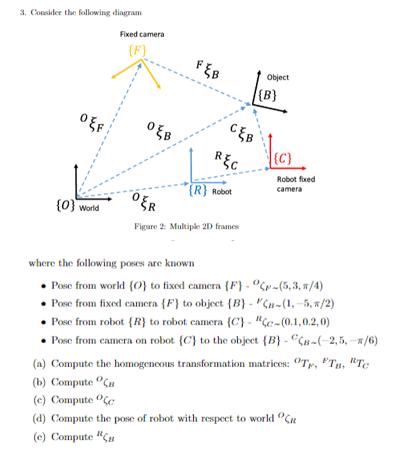
3. Consider the following diagram OFF {0} world Fixed camera (F) FEB CEB REC {R} Robot OER Figure 2: Multiple 2D frames Object {B} (C) Robot fixed camera where the following poses are known Pose from world (O) to fixed camera (F)-C-(5,3, /4) Pose from fixed camera (F) to object (B)-"C-(1.-5./2) Pose from robot {R} to robot camera (C)- "Ce-(0.1,0.2,0) Pose from camera on robot (C) to the object (B)-C-(-2,5, #/6) (a) Compute the homogeneous transformation matrices: "Tr, T. "Te (b) Compute Cu (e) Compute C (d) Compute the pose of robot with respect to world C (e) Compute "C
Step by Step Solution
★★★★★
3.42 Rating (152 Votes )
There are 3 Steps involved in it
Step: 1
3 Solution Cuven dela Consider the following diagram e OFF Fixed camera F OB ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Discrete and Combinatorial Mathematics An Applied Introduction
Authors: Ralph P. Grimaldi
5th edition
201726343, 978-0201726343