

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
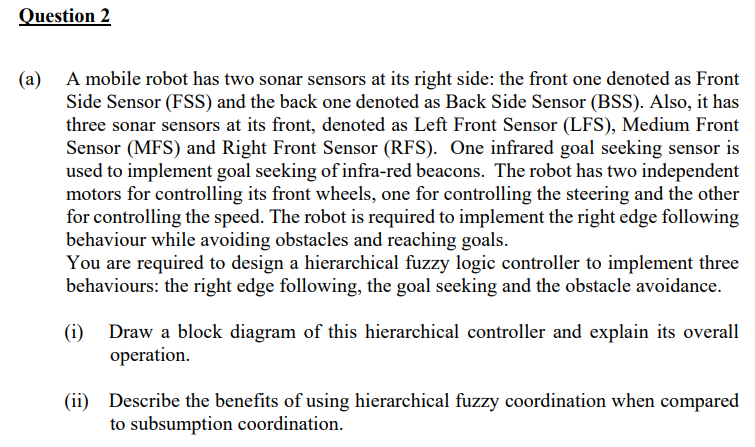
Hello, please write with full explanation when answering the questions because I will be using it for understanding and revision purposes. This regards Robotics. Thank
Hello, please write with full explanation when answering the questions because I will be using it for understanding and revision purposes. This regards Robotics. Thank you.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Flash XML Applications Use AS2 And AS3 To Create Photo Galleries Menus And Databases
Authors: Joachim Schnier
1st Edition
0240809173, 978-0240809175