

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
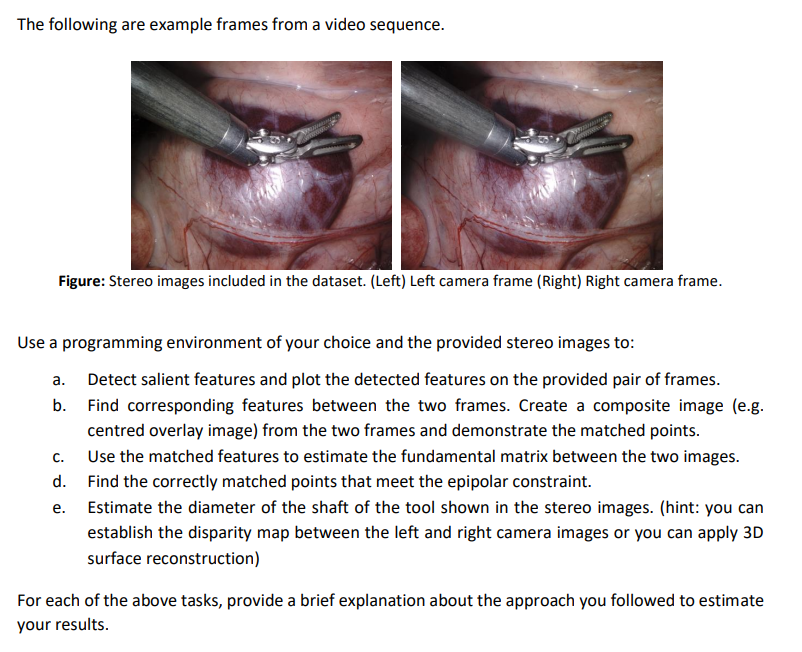
I have got the following camera parameters that I am trying to integrate into the code I have regarding the task shown in the image;
I have got the following camera parameters that I am trying to integrate into the code I have regarding the task shown in the image; Camera Frame:
Intrinsic matrix:
ee
ee
Distortion: eee
Camera Frame:
Intrinsic matrix:
ee
ee
Distortion: eee
Transformation between cameras from Camera to :
Rvec:
eee
ee
eee
Tvec e
e
emm
The distortion coefficient vectors are defined as k k p p k where kn are the radial
distortion coefficients and pn are the tangential distortion coefficients. and the code is as below: import cv
import numpy as np
import matplotlib.pyplot as plt
# Paths to the images
leftimagepath 'leftframe.png
rightimagepath 'rightframe.png
# Function to safely load images and resize if they don't match
def loadandresizeimagesleftimagepath, rightimagepath:
leftimage cvimreadleftimagepath, cvIMREADGRAYSCALE
rightimage cvimreadrightimagepath, cvIMREADGRAYSCALE
if leftimage is None or rightimage is None:
printError loading images."
return None, None
try:
# Resize the images to a common size if they don't match
if leftimage.shape rightimage.shape:
commonsize minleftimage.shape rightimage.shape
minleftimage.shape rightimage.shape
leftimage cvresizeleftimage, commonsize
rightimage cvresizerightimage, commonsize
except Exception as e:
printfError resizing images: e
# Return None to indicate an issue
return None, None
return leftimage, rightimage
# Paths to the images
leftimagepath 'leftframe.png
rightimagepath 'rightframe.png
# Load and resize images
leftimage, rightimage loadandresizeimagesleftimagepath, rightimagepath
# Proceed only if both images are successfully loaded and resized
if leftimage is not None and rightimage is not None:
# Continue with your processing here...
# b Find Corresponding Features and Create Composite Image
orb cvORBcreate
keypoints descriptors orb.detectAndComputeleftimage, None
keypoints descriptors orb.detectAndComputerightimage, None
bf cvBFMatchercvNORMHAMMING, crossCheckTrue
matches bfmatchdescriptors descriptors
matches sortedmatches keylambda x: xdistance
compositeimage cvdrawMatchesleftimage, keypoints rightimage, keypoints matches: None
pltimshowcompositeimage pltshow
# c Estimate Fundamental Matrix
points npfloatkeypointsmqueryIdxpt for m in matchesreshape
points npfloatkeypointsmtrainIdxpt for m in matchesreshape
fundamentalmatrix, mask cvfindFundamentalMatpoints points cvFMRANSAC
printfundamentalmatrix
# d Find Correctly Matched Points with Epipolar Constraint
correctmatches m for m msk in zipmatches mask if msk
# e Estimate Shaft Diameter using Disparity Map or D Reconstruction
# Implement stereo vision algorithms and D reconstruction techniques here
stereo cvStereoSGBMcreateminDisparity numDisparities blockSize
disparitymap stereo.computeleftimage, rightimage
# Extract relevant region and calculate diameter based on disparity
relevantregion disparitymap:: # Adjust region based on your dataset
shaftdiameter npmaxrelevantregion # Assuming the shaft is the highest disparity value
printEstimated Shaft Diameter:", shaftdiameter
# Display disparity map
pltimshowdisparitymap, cmap'plasma' pltshow
else:
printSkipping image pair due to an error."
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Structured Search For Big Data From Keywords To Key-objects
Authors: Mikhail Gilula
1st Edition
012804652X, 9780128046524