

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider the manipulator shown in Figure-2. The manipulator's current configuration is given by the variables h (in meters), 0 (in rad), d (in meters)
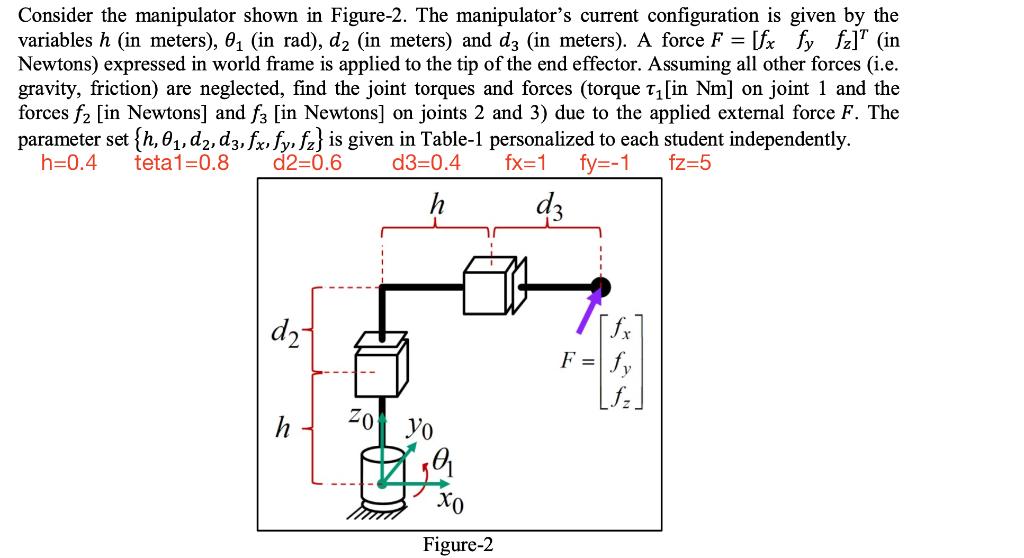
Consider the manipulator shown in Figure-2. The manipulator's current configuration is given by the variables h (in meters), 0 (in rad), d (in meters) and d3 (in meters). A force F = [fx fy fz] (in Newtons) expressed in world frame is applied to the tip of the end effector. Assuming all other forces (i.e. gravity, friction) are neglected, find the joint torques and forces (torque T [in Nm] on joint 1 and the forces f [in Newtons] and f3 [in Newtons] on joints 2 and 3) due to the applied external force F. The parameter set {h, 0, d, d3, fx, fy, fz} is given in Table-1 personalized to each student independently. d2=0.6 fz=5 h=0.4 teta1=0.8 d3=0.4 fx=1 fy=-1 d2 h ZO Yo 50 XO Figure-2 d3 F = fy
Step by Step Solution
★★★★★
3.53 Rating (180 Votes )
There are 3 Steps involved in it
Step: 1
Solution We need to calculate the joint torques and forces We need to use the DenavitHartenberg DH p...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamental Accounting Principles
Authors: John Wild, Ken Shaw, Barbara Chiappetta
22nd edition
9781259566905, 978-0-07-76328, 77862279, 1259566900, 0-07-763289-3, 978-0077862275