

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Implement Monte Carlo localization for a simulated robot with range sensors. A grid map and range data are available from the code repository at
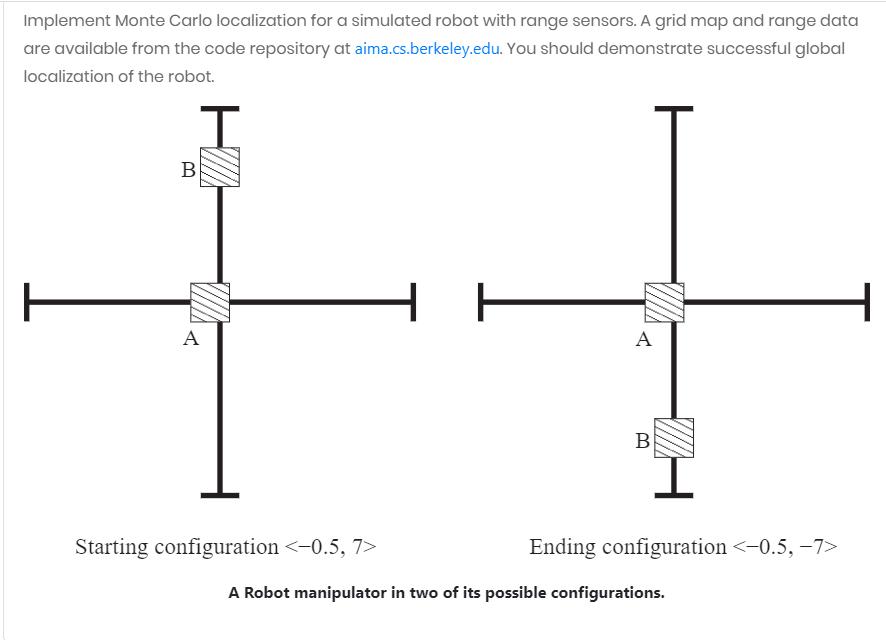
Implement Monte Carlo localization for a simulated robot with range sensors. A grid map and range data are available from the code repository at aima.cs.berkeley.edu. You should demonstrate successful global localization of the robot. I A B A Starting configuration B WIN Ending configuration A Robot manipulator in two of its possible configurations.
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Monte Carlo Localization In samplingbased methods one represents the density p x k Z k by a set of N random samples or particles S k S k i 1N drawn from it We are able to do this because of the essent...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Using Financial Accounting Information The Alternative to Debits and Credits
Authors: Gary A. Porter, Curtis L. Norton
7th Edition
978-0-538-4527, 0-538-45274-9, 978-1133161646