

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
In terms of the s, s, 2s coordinates of a fixed space frame {s}, a frame {a} has its &a-axis pointing in the direction
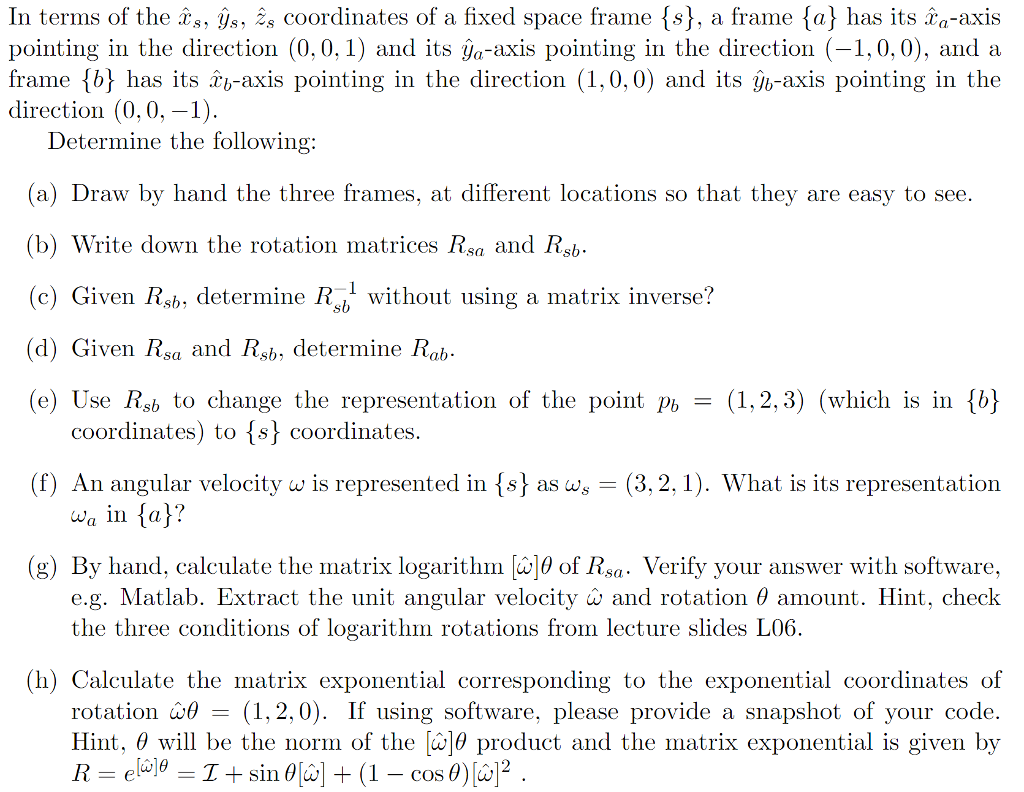
In terms of the s, s, 2s coordinates of a fixed space frame {s}, a frame {a} has its &a-axis pointing in the direction (0, 0, 1) and its a-axis pointing in the direction (-1,0,0), and a frame {b} has its -axis pointing in the direction (1,0,0) and its -axis pointing in the direction (0, 0, -1). Determine the following: (a) Draw by hand the three frames, at different locations so that they are easy to see. (b) Write down the rotation matrices Rsa and Rsb. (c) Given Rsb, determine Rwithout using a matrix inverse? (d) Given Rsa and Rsb, determine Rab. (e) Use Rsb to change the representation of the point p = (1,2,3) (which is in {b} coordinates) to {s} coordinates. (f) An angular velocity w is represented in {s} as ws = wa in {a}? (3, 2, 1). What is its representation (g) By hand, calculate the matrix logarithm [] of Rsa. Verify your answer with software, e.g. Matlab. Extract the unit angular velocity and rotation amount. Hint, check the three conditions of logarithm rotations from lecture slides L06. (h) Calculate the matrix exponential corresponding to the exponential coordinates of rotation A = (1,2,0). If using software, please provide a snapshot of your code. Hint, will be the norm of the [] product and the matrix exponential is given by R = e = I + sin 0 [w] + (1 - cos 0) [w] .
Step by Step Solution
★★★★★
3.52 Rating (152 Votes )
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Investment Analysis and Portfolio Management
Authors: Frank K. Reilly, Keith C. Brown
10th Edition
538482109, 1133711774, 538482389, 9780538482103, 9781133711773, 978-0538482387