

Question: In the P - P - P robotic manipulator, the linear displacement variables 1 y ' 2 y ' and 3 z are not often
In the PPP robotic manipulator, the linear displacement variables and are not
often assigned constant values because they correspond to the translational displacements
of the prismatic joints. More often, displacement ranges are assigned to these variables.
Example
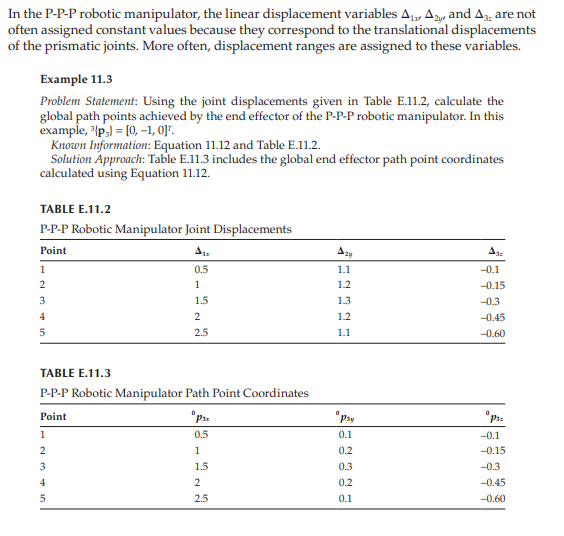
Problem Statement: Using the joint displacements given in Table E calculate the
global path points achieved by the end effector of the PPP robotic manipulator. In this
example,
Known Information: Equation and Table E
Solution Approach: Table E includes the global end effector path point coordinates
calculated using Equation
TABLE E
PPP Robotic Manipulator Joint Displacements
TABLE E
PPP Robotic Manipulator Path Point Coordinates
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock