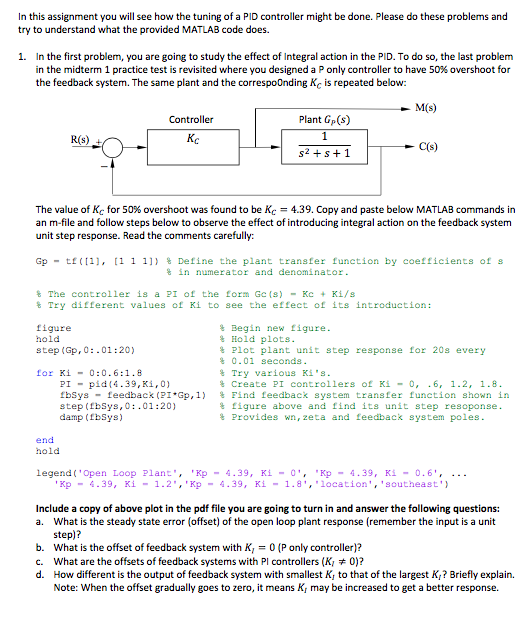
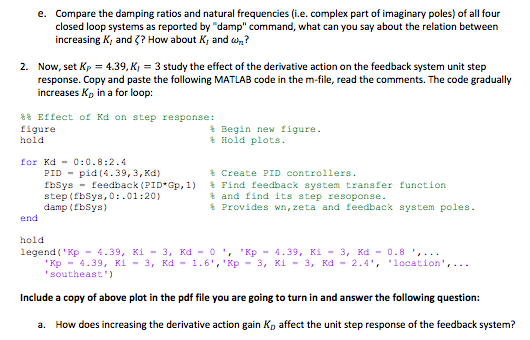
In this assignment you will see how the tuning of a PID controller might be done. Please do these problems and try to understand what the provided MATLAB code does. In the first problem, you are going to study the effect of Integral action in the PID. To do so, the last problem in the midterm 1 practice test is revisited where you designed a P only controller to have 50% overshoot for the feedback system. The same plant and the correspo0nding Kc is repeated below: 1. M(s) Controller Plant Gp(s) R(s) + Kc C(s) s2 +s1 The value of Kc for 50% overshoot was found to be Kc = 4.39. Copy and paste below MATLAB commands in an m-file and follow steps below to observe the effect of introducing integral action on the feedback system unit step response. Read the comments carefully: Gp- tf([1], [1 1 1]} % Define the plant transfer function by coefficients of 8 % in numerator and denominator The controller is a P1 of the form Ge{s)-Ke + Ki/s Try different values of Ki to see the effect of its introduction : figure hold step (Gp, 0:.01:20) % Begin new figure % Hold plots Ki PI- pid(4.39,Ki, 0) fbSys- feedback(21+Gp,1) step (fbSys,0:.01:20) damp (fbsys) % 0.01 seconds % Create PI controllers of Ki-0, .6, 1.2, 1.8 % figure above and find its unit step resoponse Plot plant unit step response for 20s every Try various Ki's Find feedback sysem transfer function shown in Provides wn ,zeta and feedback system poles for 0:0.6:1.8 - hold legend ('Open Loop Plant', 'Kp4.39, K -0', "Kp -4.39, Ki -0.6', Kp-.39, Ki-1.2,'Kp-4.39, Ki-1.8,location','southeast' Include a copy of above plot in the pdf file you are going to turn in and answer the following questions: a. What is the steady state error (offset) of the open loop plant response (remember the input is a unit step)? b, what is the offset of feedback system with K, = 0 (P only controller)? c. what are the offsets of feedback systems with PI controllers (K, 0)? d. How different is the output of feedback system with smallest K, to that of the largest K? Briefly explain. Note: When the offset gradually goes to zero, it means K may be increased to get a better response. In this assignment you will see how the tuning of a PID controller might be done. Please do these problems and try to understand what the provided MATLAB code does. In the first problem, you are going to study the effect of Integral action in the PID. To do so, the last problem in the midterm 1 practice test is revisited where you designed a P only controller to have 50% overshoot for the feedback system. The same plant and the correspo0nding Kc is repeated below: 1. M(s) Controller Plant Gp(s) R(s) + Kc C(s) s2 +s1 The value of Kc for 50% overshoot was found to be Kc = 4.39. Copy and paste below MATLAB commands in an m-file and follow steps below to observe the effect of introducing integral action on the feedback system unit step response. Read the comments carefully: Gp- tf([1], [1 1 1]} % Define the plant transfer function by coefficients of 8 % in numerator and denominator The controller is a P1 of the form Ge{s)-Ke + Ki/s Try different values of Ki to see the effect of its introduction : figure hold step (Gp, 0:.01:20) % Begin new figure % Hold plots Ki PI- pid(4.39,Ki, 0) fbSys- feedback(21+Gp,1) step (fbSys,0:.01:20) damp (fbsys) % 0.01 seconds % Create PI controllers of Ki-0, .6, 1.2, 1.8 % figure above and find its unit step resoponse Plot plant unit step response for 20s every Try various Ki's Find feedback sysem transfer function shown in Provides wn ,zeta and feedback system poles for 0:0.6:1.8 - hold legend ('Open Loop Plant', 'Kp4.39, K -0', "Kp -4.39, Ki -0.6', Kp-.39, Ki-1.2,'Kp-4.39, Ki-1.8,location','southeast' Include a copy of above plot in the pdf file you are going to turn in and answer the following questions: a. What is the steady state error (offset) of the open loop plant response (remember the input is a unit step)? b, what is the offset of feedback system with K, = 0 (P only controller)? c. what are the offsets of feedback systems with PI controllers (K, 0)? d. How different is the output of feedback system with smallest K, to that of the largest K? Briefly explain. Note: When the offset gradually goes to zero, it means K may be increased to get a better response




