

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
In this lab, we will demonstrate the animation of a robot with the configuration shown in Figure 1, which includes two revolute (rotation) joints
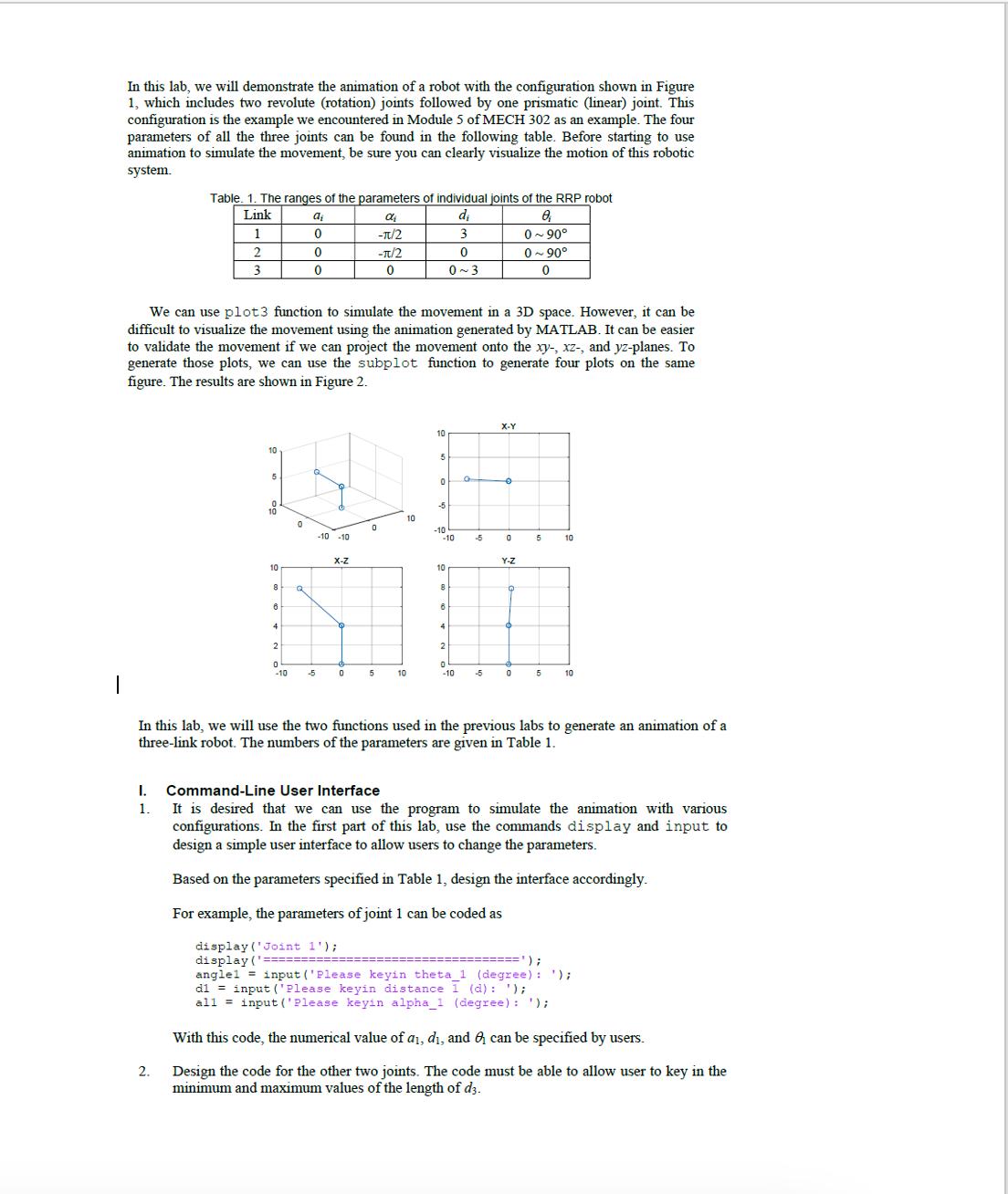
In this lab, we will demonstrate the animation of a robot with the configuration shown in Figure 1, which includes two revolute (rotation) joints followed by one prismatic (linear) joint. This configuration is the example we encountered in Module 5 of MECH 302 as an example. The four parameters of all the three joints can be found in the following table. Before starting to use animation to simulate the movement, be sure you can clearly visualize the motion of this robotic system. I. Table. 1. The ranges of the parameters of individual joints of the RRP robot Link d 0 1 3 0 0~90 0~90 0 0~3 1. 2 3 2. We can use plot 3 function to simulate the movement in a 3D space. However, it can be difficult to visualize the movement using the animation generated by MATLAB. It can be easier to validate the movement if we can project the movement onto the xy-, xz-, and yz-planes. To generate those plots, we can use the subplot function to generate four plots on the same figure. The results are shown in Figure 2. 5 0 10 10 8 6 4 2 0 -10 at 0 0 0 0 -5 -10 -10 X-Z 0 0 0 -TT/2 5 -TT/2 0 10 10 10 0 -5 -10 -10 10 8 4 0 -10 O -5 X-Y 0 Y-Z 0 5 In this lab, we will use the two functions used in the previous labs to generate an animation of a three-link robot. The numbers of the parameters are given in Table 1. 10 10 Command-Line User Interface It is desired that we can use the program to simulate the animation with various configurations. In the first part of this lab, use the commands display and input to design a simple user interface to allow users to change the parameters. Based on the parameters specified in Table 1, design the interface accordingly. For example, the parameters of joint 1 can be coded as display ('Joint 1'); display('========= ========='); anglel input ('Please keyin theta_1 (degree): '); d1 = input ('Please keyin distance 1 (d) : '); all input ('Please keyin alpha_1 (degree) : '); With this code, the numerical value of a, d, and can be specified by users. Design the code for the other two joints. The code must be able to allow user to key in the minimum and maximum values of the length of d3.
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Here is the code to design a simple commandline user interface to allow users to change the paramete...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516