

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
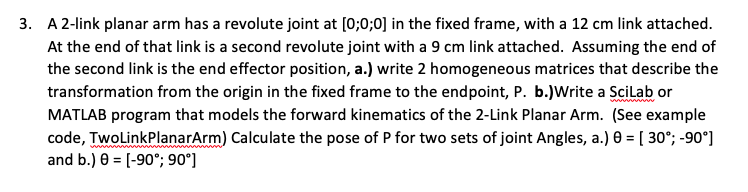
Intro to Robotics 3. A 2-link planar arm has a revolute joint at (0;0;0) in the fixed frame, with a 12 cm link attached. At
Intro to Robotics
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle 10g Database Administrator Implementation And Administration
Authors: Gavin Powell, Carol McCullough Dieter
2nd Edition
1418836656, 9781418836658