

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
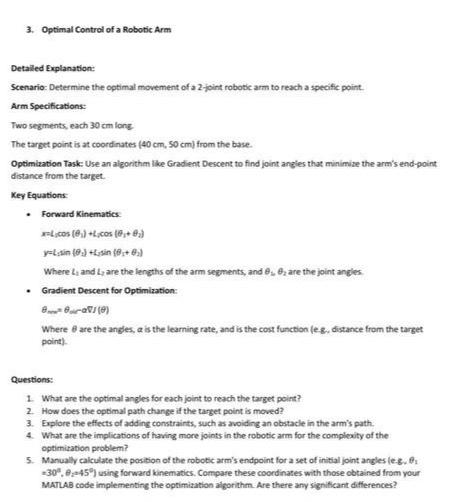
Optimal Control of a Robotic Arm Detailed Explanation: Scenario: Determine the optimal movement of a 2 - joint robotic arm to reach a specific point.
Optimal Control of a Robotic Arm
Detailed Explanation:
Scenario: Determine the optimal movement of a joint robotic arm to reach a specific point.
Arm Specifications:
Two segments, each long:
The target point is at coordinates from the base.
Optimbation Task: Use an algorithm like Gradient Descent to find joint angles that minimise the arm's endpoint distance from the target.
Key Equations:
Forward Kinematics.
Where and are the lengths of the arm sepments, and are the joint angles.
Gradient Descent for Optimization:
Where are the andes, is the learning rate, and is the cost function e distance from the target point
Questions:
What are the optimal angles for each joint to reach the target point?
How does the optimal path change if the taget point is moved?
Explore the effects of adding constraints, wuch as avoiding an obstacle in the arm's path.
What are the implications of having more joints in the robotic arm for the complexity of the optimiration problem?
Manually calculate the position of the robotic arm's endpoint for a set of initial joint angles eg J using forward kinematics, Compare these coordinates with those obtained from your MATLAB code implementing the optimiation algorithm. Are there any significant differences?
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Beginning Microsoft SQL Server 2012 Programming
Authors: Paul Atkinson, Robert Vieira
1st Edition
1118102282, 9781118102282