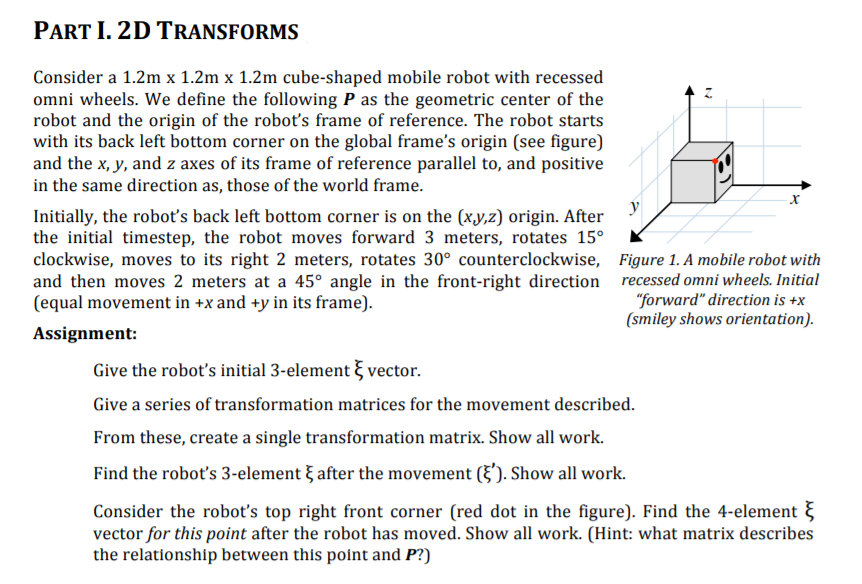
PART I. 2D TRANSFORMS Consider a 1.2m x 1.2m x 1.2m cube-shaped mobile robot with recessed omni wheels. We define the following P as the geometric center of the robot and the origin of the robot's frame of reference. The robot starts with its back left bottom corner on the global frame's origin (see figure) and the x, y, and z axes of its frame of reference parallel to, and positive in the same direction as, those of the world frame. Initially, the robot's back left bottom corner is on the (xyz) origin. After the initial timestep, the robot moves forward 3 meters, rotates 15 clockwise, moves to its right 2 meters, rotates 30 counterclockwise, Figure 1. A mobile robot with and then moves 2 meters at a 45 angle in the front-right direction recessed omni wheels. Initial (equal movement in +x and ty in its frame). "forward" direction is tx (smiley shows orientation. Assignment: Give the robot's initial 3-element5 vector Give a series of transformation matrices for the movement described. From these, create a single transformation matrix. Show all work. Find the robot's 3-element after the movement (). Show all work. Consider the robot's top right front corner (red dot in the figure). Find the 4-element 5 vector for this point after the robot has moved. Show all work. (Hint: what matrix describes the relationship between this point and P?) PART I. 2D TRANSFORMS Consider a 1.2m x 1.2m x 1.2m cube-shaped mobile robot with recessed omni wheels. We define the following P as the geometric center of the robot and the origin of the robot's frame of reference. The robot starts with its back left bottom corner on the global frame's origin (see figure) and the x, y, and z axes of its frame of reference parallel to, and positive in the same direction as, those of the world frame. Initially, the robot's back left bottom corner is on the (xyz) origin. After the initial timestep, the robot moves forward 3 meters, rotates 15 clockwise, moves to its right 2 meters, rotates 30 counterclockwise, Figure 1. A mobile robot with and then moves 2 meters at a 45 angle in the front-right direction recessed omni wheels. Initial (equal movement in +x and ty in its frame). "forward" direction is tx (smiley shows orientation. Assignment: Give the robot's initial 3-element5 vector Give a series of transformation matrices for the movement described. From these, create a single transformation matrix. Show all work. Find the robot's 3-element after the movement (). Show all work. Consider the robot's top right front corner (red dot in the figure). Find the 4-element 5 vector for this point after the robot has moved. Show all work. (Hint: what matrix describes the relationship between this point and P?)