

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Please do 3.1 a and 3.2 3.1 Camera Matrix Computation a. Calculate the camera intrinsic matrix K, extrinsic matrix E, and full rank 44 projection
Please do 3.1 a and 3.2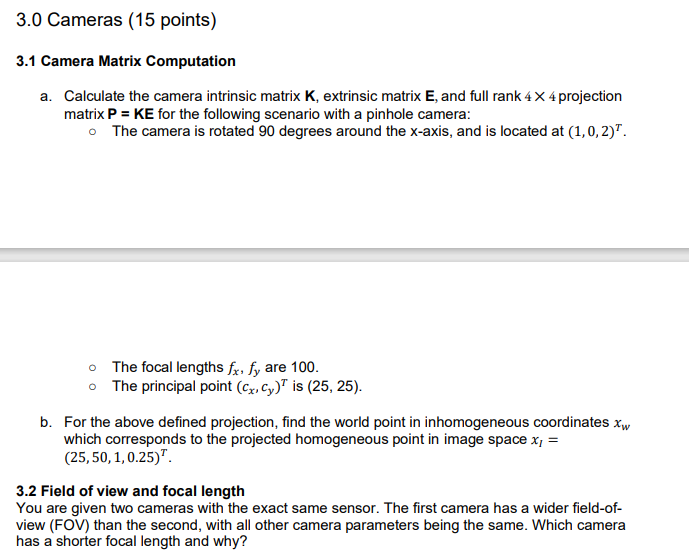
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Advanced Data Management For Sql Nosql Cloud And Distributed Databases
Authors: Lena Wiese
1st Edition
9783110441406