Please! Solve part c and e.
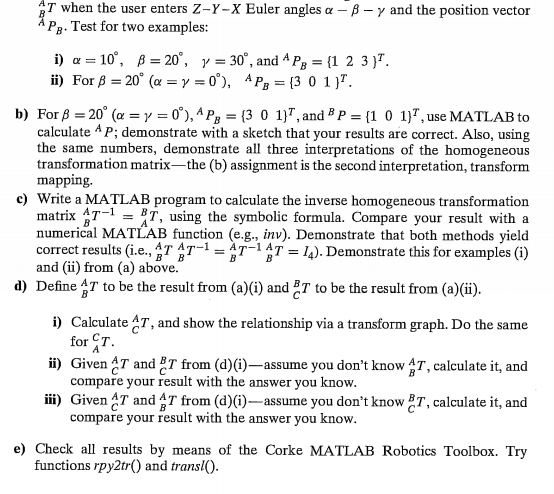
At when the user enters Z-Y-X Euler anglesa - B -y and the position vector A Pg. Test for two examples: i) a = 10", B = 20, y = 30, and P8 = {1 2 3). ii) For = 20 (a = y = 0), A Pg = {3 0 1). b) For 8 = 20 (a = y = 0), Pg = {3 O 1)", and p = {1 O 1), use MATLAB to calculate AP; demonstrate with a sketch that your results are correct. Also, using the same numbers, demonstrate all three interpretations of the homogeneous transformation matrixthe (b) assignment is the second interpretation, transform mapping. c) Write a MATLAB program to calculate the inverse homogeneous transformation matrix 47-1 = T, using the symbolic formula. Compare your result with a numerical MATLAB function (e.g., inv). Demonstrate that both methods yield correct results (i.e., 9747-1 = A7-A7 = 14). Demonstrate this for examples (i) and (ii) from (a) above." d) Define 47 to be the result from (a)(i) and 1 to be the result from (a)(i). i) Calculate CT, and show the relationship via a transform graph. Do the same for T. ii) Given T and T from (d) (i) - assume you don't know A7, calculate it, and compare your result with the answer you know. iii) Given T and 47 from (d) (i)--assume you don't know 87, calculate it, and compare your result with the answer you know. e) Check all results by means of the Corke MATLAB Robotics Toolbox. Try functions rpy2tr() and transl(). At when the user enters Z-Y-X Euler anglesa - B -y and the position vector A Pg. Test for two examples: i) a = 10", B = 20, y = 30, and P8 = {1 2 3). ii) For = 20 (a = y = 0), A Pg = {3 0 1). b) For 8 = 20 (a = y = 0), Pg = {3 O 1)", and p = {1 O 1), use MATLAB to calculate AP; demonstrate with a sketch that your results are correct. Also, using the same numbers, demonstrate all three interpretations of the homogeneous transformation matrixthe (b) assignment is the second interpretation, transform mapping. c) Write a MATLAB program to calculate the inverse homogeneous transformation matrix 47-1 = T, using the symbolic formula. Compare your result with a numerical MATLAB function (e.g., inv). Demonstrate that both methods yield correct results (i.e., 9747-1 = A7-A7 = 14). Demonstrate this for examples (i) and (ii) from (a) above." d) Define 47 to be the result from (a)(i) and 1 to be the result from (a)(i). i) Calculate CT, and show the relationship via a transform graph. Do the same for T. ii) Given T and T from (d) (i) - assume you don't know A7, calculate it, and compare your result with the answer you know. iii) Given T and 47 from (d) (i)--assume you don't know 87, calculate it, and compare your result with the answer you know. e) Check all results by means of the Corke MATLAB Robotics Toolbox. Try functions rpy2tr() and transl()




