

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
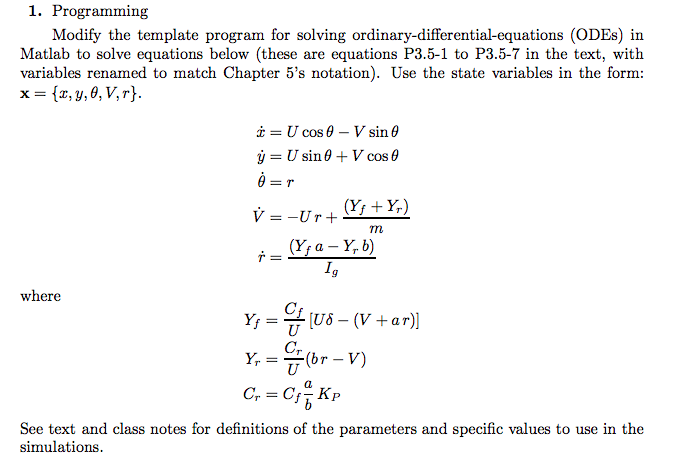
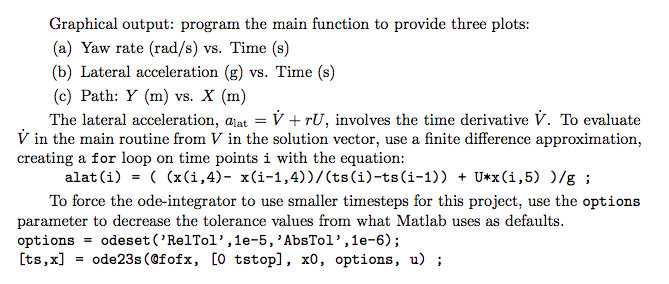
please use Matlab to code this question. equations 3.5-1 thru 3.5-7 are provided in the txt 1. Programming Modify the template program for solving ordinary-differential-equations
please use Matlab to code this question.
equations 3.5-1 thru 3.5-7 are provided in the txt
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction To Financial Models For Management And Planning
Authors: James R Morris, John P Daley
2nd Edition
1498765041, 9781498765046