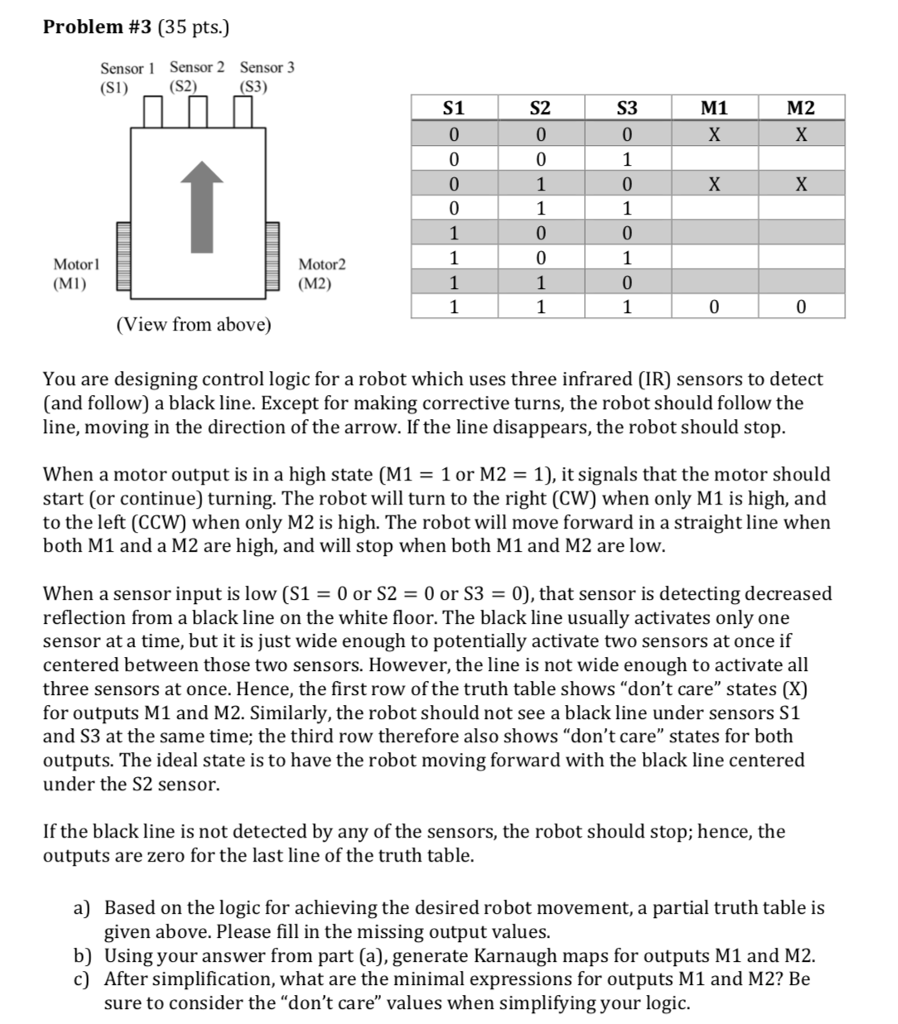
Problem #3 (35 pts.) Sensor 1 Sensor 2 Sensor 3 (S1) (S2) S1 S2 S3 M1 M2 0 Motor (MI) Motor (M2) (View from above) You are designing control logic for a robot which uses three infrared (IR) sensors to detect (and follow) a black line. Except for making corrective turns, the robot should follow the line, moving in the direction of the arrow. If the line disappears, the robot should stop. when a motor output is in a high state (M1 1 or M2 = 1), it signals that the motor should start (or continue) turning. The robot will turn to the right (CW) when only M1 is high, and to the left (CCW) when only M2 is high. The robot will move forward in a straight line when both M1 and a M2 are high, and will stop when both M1 and M2 are low. when a sensor input is low (S1 = 0 or S2 = 0 or S3 = 0), that sensor is detecting decreased reflection from a black line on the white floor. The black line usually activates only one sensor at a time, but it is just wide enough to potentially activate two sensors at once if centered between those two sensors. However, the line is not wide enough to activate all three sensors at once. Hence, the first row of the truth table shows "don't care" states (X) for outputs M1 and M2. Similarly, the robot should not see a black line under sensors S1 and S3 at the same time; the third row therefore also shows "don't care" states for both outputs. The ideal state is to have the robot moving forward with the black line centered under the S2 sensor. If the black line is not detected by any of the sensors, the robot should stop; hence, the outputs are zero for the last line of the truth table. a) Based on the logic for achieving the desired robot movement, a partial truth table is given above. Please fill in the missing output values b) Using your answer from part (a), generate Karnaugh maps for outputs M1 and M2. c) After simplification, what are the minimal expressions for outputs M1 and M2? Be sure to consider the "don't care" values when simplifying your logic. Problem #3 (35 pts.) Sensor 1 Sensor 2 Sensor 3 (S1) (S2) S1 S2 S3 M1 M2 0 Motor (MI) Motor (M2) (View from above) You are designing control logic for a robot which uses three infrared (IR) sensors to detect (and follow) a black line. Except for making corrective turns, the robot should follow the line, moving in the direction of the arrow. If the line disappears, the robot should stop. when a motor output is in a high state (M1 1 or M2 = 1), it signals that the motor should start (or continue) turning. The robot will turn to the right (CW) when only M1 is high, and to the left (CCW) when only M2 is high. The robot will move forward in a straight line when both M1 and a M2 are high, and will stop when both M1 and M2 are low. when a sensor input is low (S1 = 0 or S2 = 0 or S3 = 0), that sensor is detecting decreased reflection from a black line on the white floor. The black line usually activates only one sensor at a time, but it is just wide enough to potentially activate two sensors at once if centered between those two sensors. However, the line is not wide enough to activate all three sensors at once. Hence, the first row of the truth table shows "don't care" states (X) for outputs M1 and M2. Similarly, the robot should not see a black line under sensors S1 and S3 at the same time; the third row therefore also shows "don't care" states for both outputs. The ideal state is to have the robot moving forward with the black line centered under the S2 sensor. If the black line is not detected by any of the sensors, the robot should stop; hence, the outputs are zero for the last line of the truth table. a) Based on the logic for achieving the desired robot movement, a partial truth table is given above. Please fill in the missing output values b) Using your answer from part (a), generate Karnaugh maps for outputs M1 and M2. c) After simplification, what are the minimal expressions for outputs M1 and M2? Be sure to consider the "don't care" values when simplifying your logic