

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 3 Consider the three-link cylindrical robot represented symbolically by the figure. The DH parameters for this manipulator are listed in the following table.
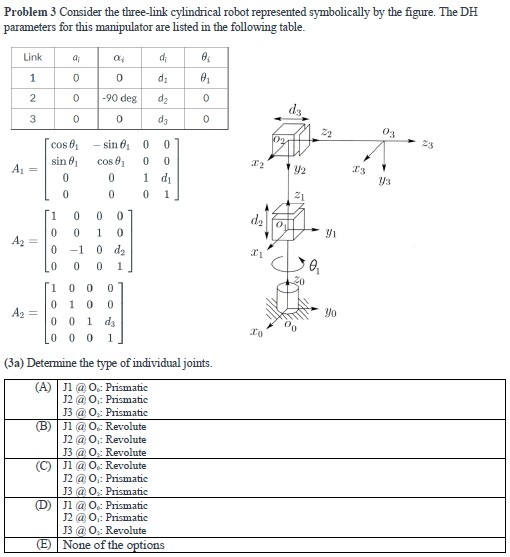
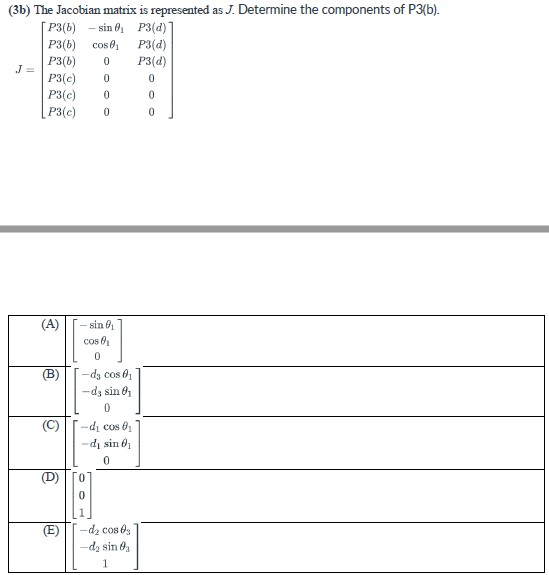
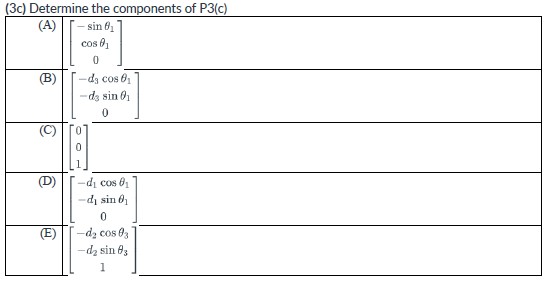
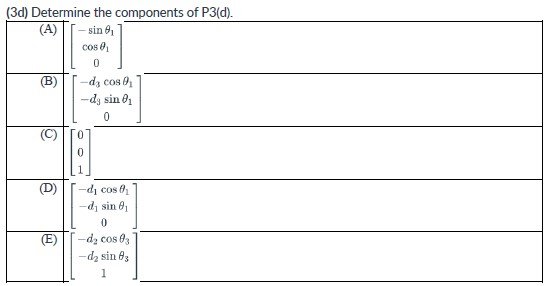
Problem 3 Consider the three-link cylindrical robot represented symbolically by the figure. The DH parameters for this manipulator are listed in the following table. Link ai di 1 0 0 d 01 2 0 -90 deg d 0 d3 3 0 0 d3 0 22 03 02 23 cos 01 -sin 01 0 0 sin 61 cos 01 0 0 2 " Y2 3 A = 0 0 1 d Y3 0 0 0 1 1 0 0 0 d 31 0 0 1 0 A = 0 -10 d 21 0 0 0 1 0 1 00 0 0 10 0 Yo A2 = 0 0 1 ds 0 0 0 1 (3a) Determine the type of individual joints. (A) J1 @O: Prismatic J2 @O: Prismatic J3 @O: Prismatic (B) J1 @O: Revolute J2 @O: Revolute J3 @O: Revolute (C) J@O: Revolute J2 @O: Prismatic J3 @O: Prismatic (D) JO: Prismatic J2 @O: Prismatic J3 @O: Revolute (E) None of the options (3b) The Jacobian matrix is represented as J. Determine the components of P3(b). [P3(b) sin P3(d) P3(b) cos 01 P3(d) P3(b) 0 P3(d) J = P3(c) 0 0 P3(c) 0 0 P3(c) 0 0 (A) -sin cos 01 0 (B) -dy cos 01 -d; sin 01 0 (C) -d cos 0 -d sin 01 0 (D) 0 (E) -d coses -d sin a 1 (3c) Determine the components of P3(c) (A) -sin 611 cos 01 (B) (D) 0 0 -da cos 01 da sin 0 0 -d cos 0" -d sin 0 0 (E) -d cos 03 -d sin 63 1 (3d) Determine the components of P3(d). (A) -sin cos 0 (B) -da cos 0 -d; sin 01 0 (E) -di cos -d sin 01 0 -d cos 03 -d sin 83 1
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Quantum Mechanics
Authors: J.J Sakurai
Revised Edition
9781108499996, 201539292, 978-0201539295