

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 3. Let F F* be a change of frame characterized by a frame-rotation Q = Q(t) and the frame-translation c(ta) for some a
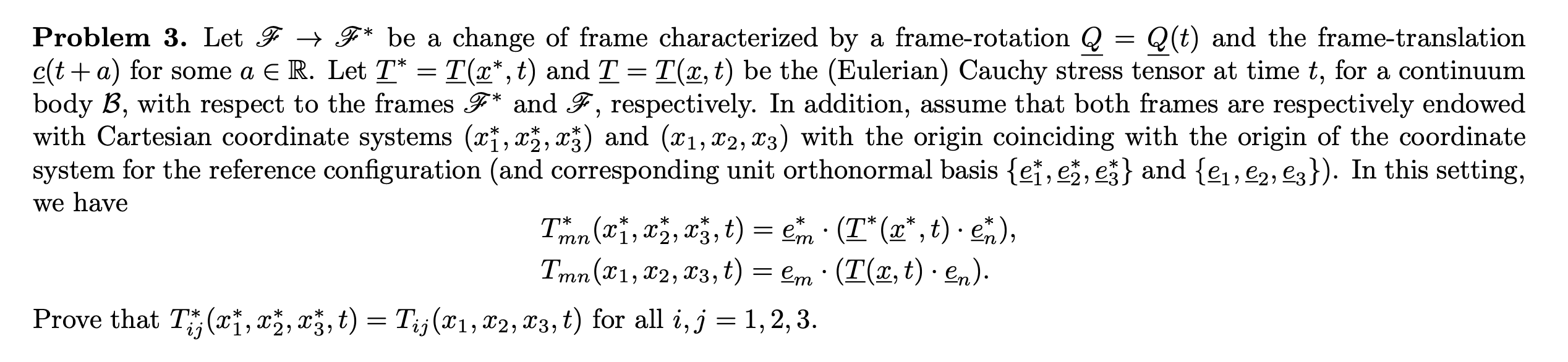
Problem 3. Let F F* be a change of frame characterized by a frame-rotation Q = Q(t) and the frame-translation c(ta) for some a R. Let T* = T(x*, t) and T = T(x, t) be the (Eulerian) Cauchy stress tensor at time t, for a continuum body B, with respect to the frames F* and F, respectively. In addition, assume that both frames are respectively endowed with Cartesian coordinate systems (x1, x2, x313) and (x1, x2, x3) with the origin coinciding with the origin of the coordinate system for the reference configuration (and corresponding unit orthonormal basis {et, ez, e} and {, 2, 3}). In this setting, we have Tmn (x1, x2, xz, t) = e (T* (x*, t) en), * * Tmn (x1, x2, x3,t) = em (T(x, t) en). Prove that T (x, xz, xz, t) = Tij(x1, x2, x3, t) for all i, j = 1, 2, 3.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Materials Science and Engineering An Integrated Approach
Authors: David G. Rethwisch
4th Edition
1118214226, 1118061608, 9781118214220, 978-1118061602