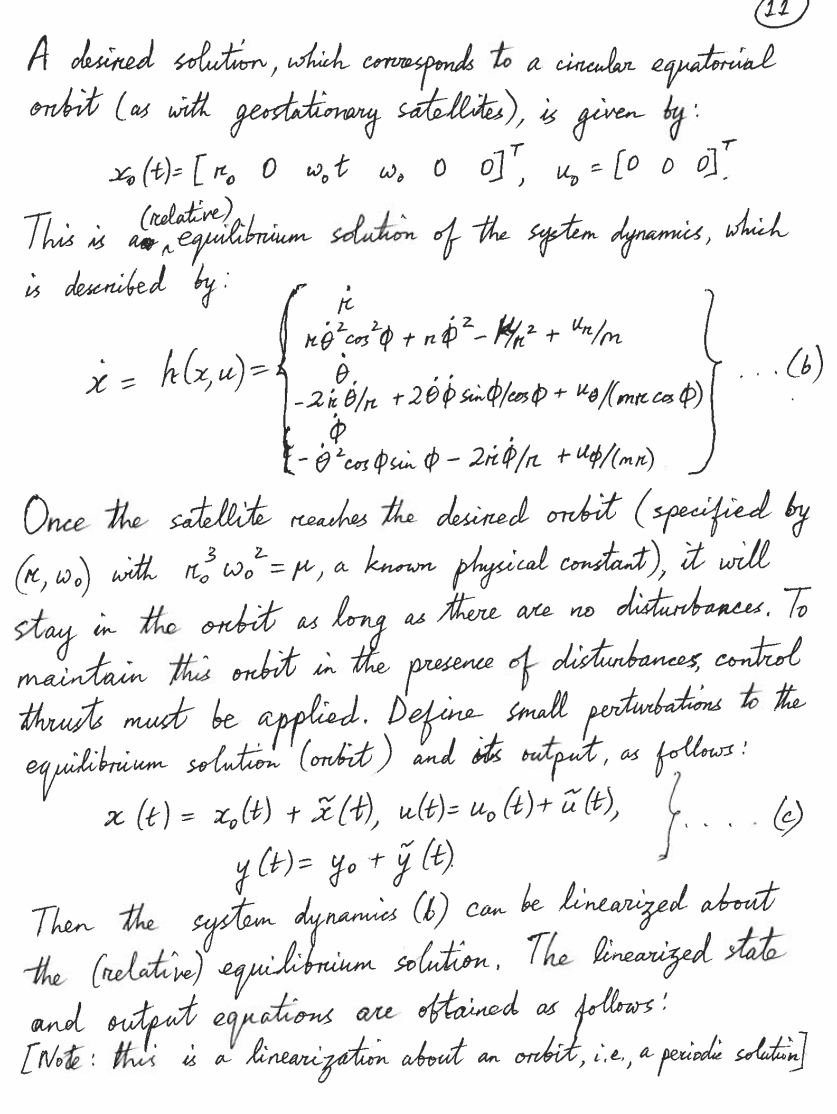
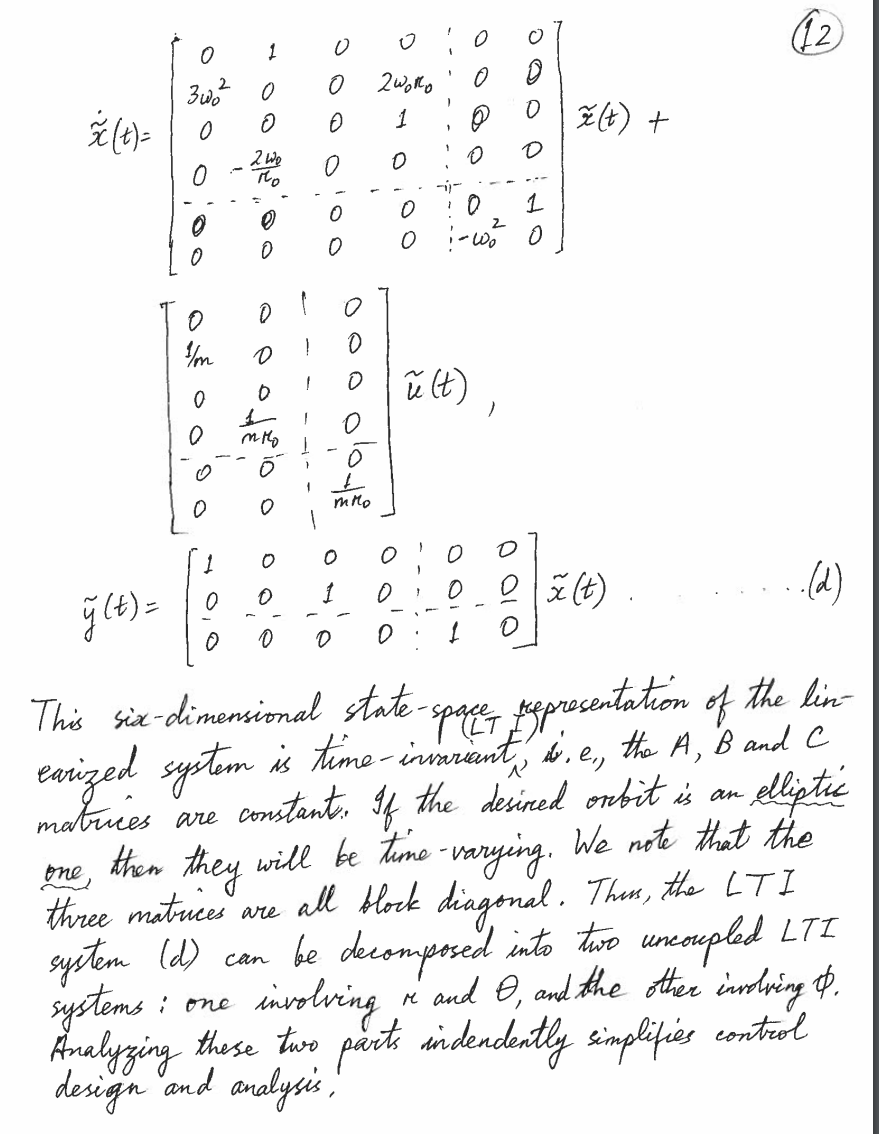
Problem 4. Consider the satellite perturbed from a circular equatorial Earth orbit, as covered in class. Linearize the nonlinear equations of motion given in class
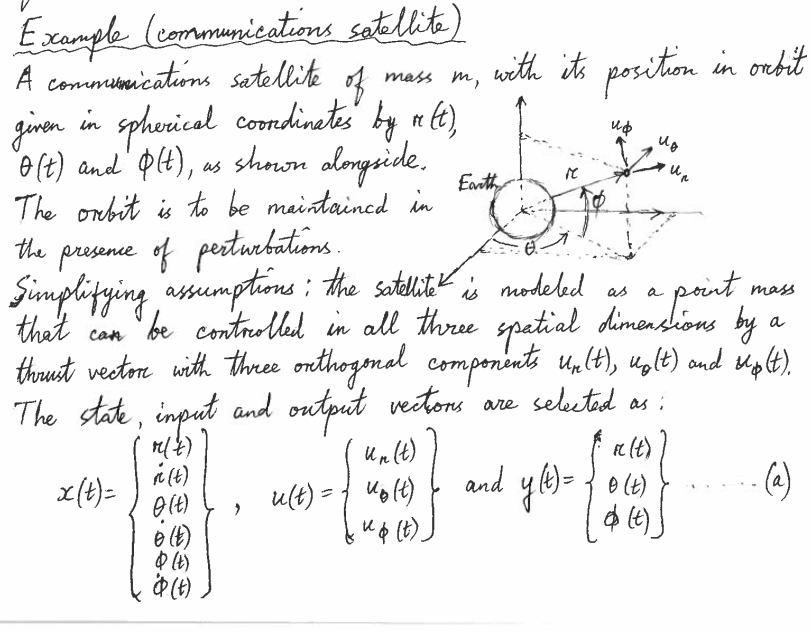
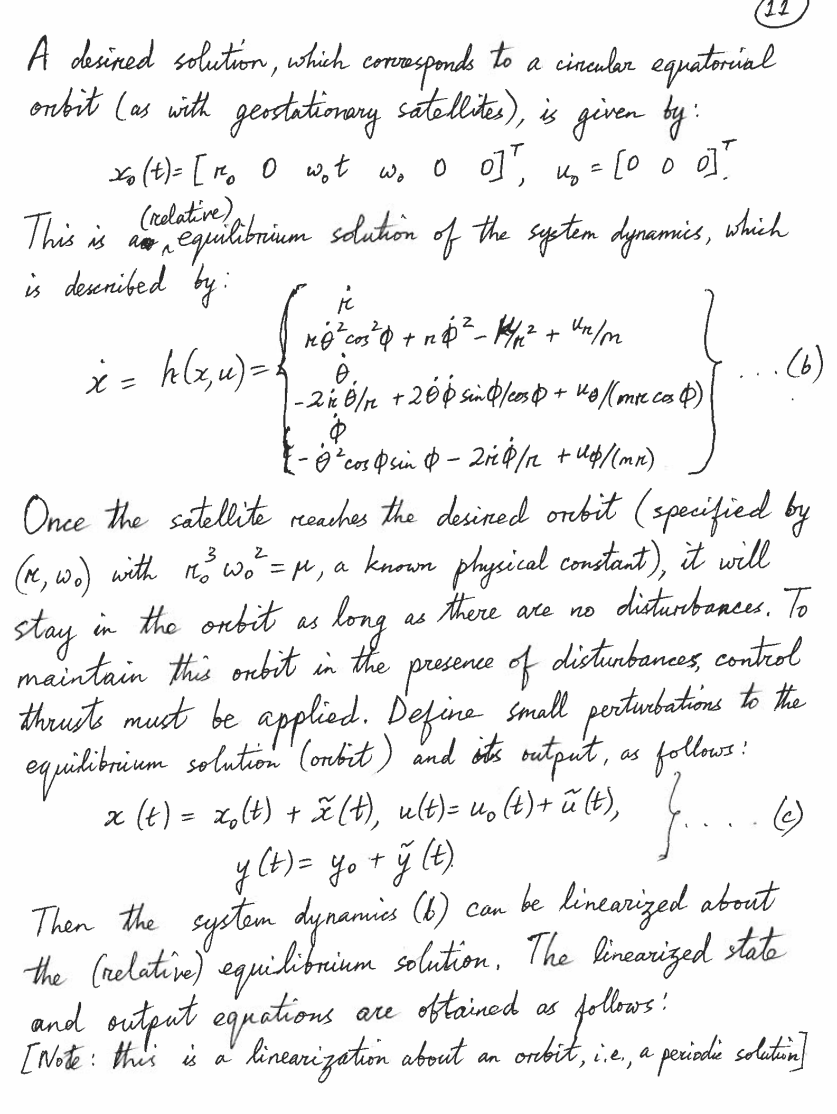
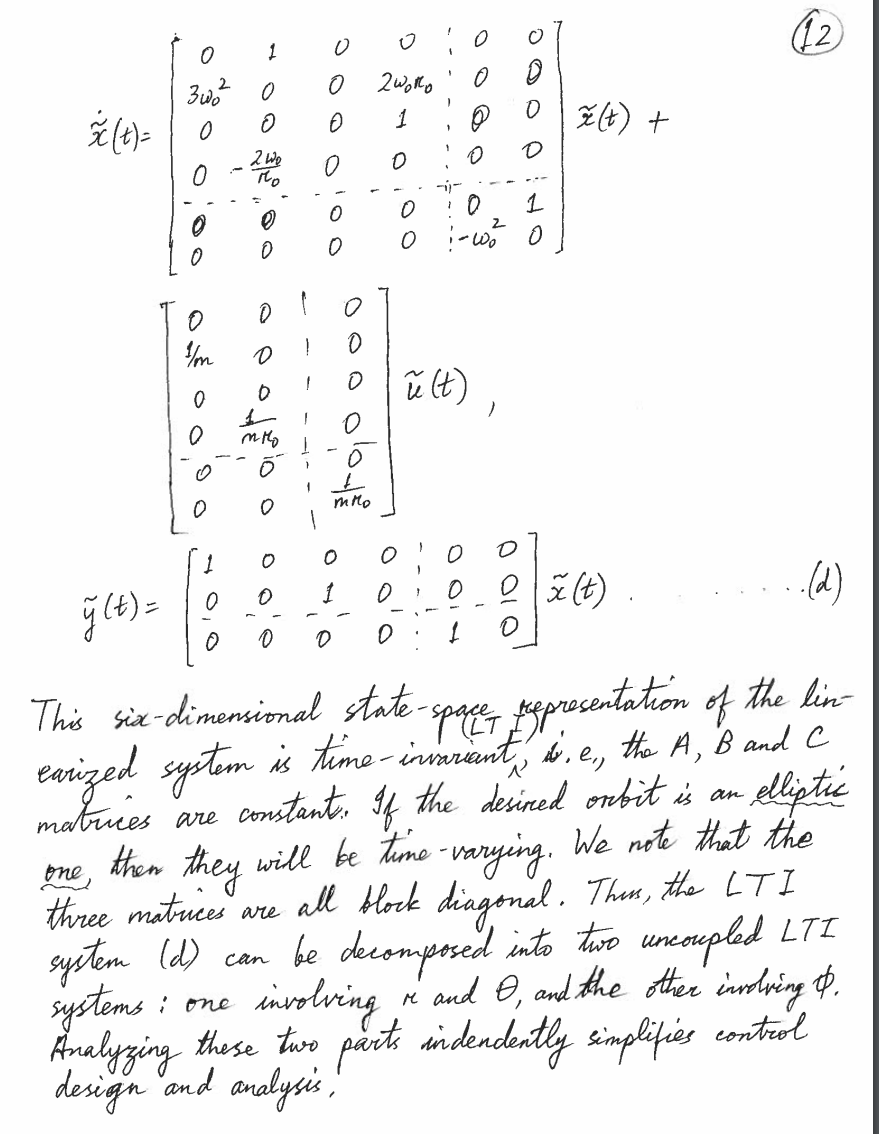
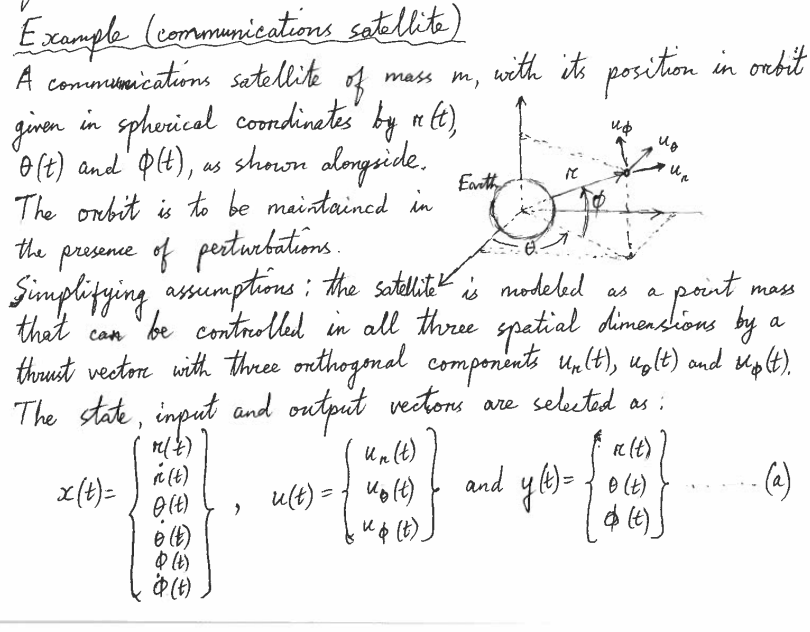
Problem 4. Consider the satellite perturbed from a circular equatorial Earth orbit, as covered in class. Linearize the nonlinear equations of motion given in class lecture notes [and available on Blackboard), and verify that the linearized equations of motion are exactly what is shown in these notes. (8} Example (communications satellite) A communications satellite of mass m , with its position in onebit given in spherical coordinates by nift) O (t ) and $(t ), as shown alongside. up The orbit is to be maintained in Earth the presence of perturbations. Simplifying assumptions: the satellite is modeled as a point mass that can be controlled in all three spatial dimensions by a thrust vector with three orthogonal components Up(t), ult) and up(t). The state , input and output vectors are selected as : 14 / # ) Un (t ) FC ( t ) it (t ) x ( t ) = (a) A (t ) " (t ) = ( volt) " and y (t) = 3 0(t ) 0 (t ) up ( t ) Q ( t ) 4 (t ) ( (t )12 A desired solution , which corresponds to a circular equatorial orbit ( as with geostationary satellites ), is given by : xo (t ) = [ mo O wot wo 0 0] , up = [0 0 0]* This is as equilibrium solution of the system dynamics , which is described by : Me cos'd + nip ?_ Hymz + Un/ m x = h (x,u) = $ O . - 2 k B / r + 20 0 sincP/ cos p + us/( miccos ) . ( b ) [ - 9 'cos psin ($ - 2:24/ 12 + Up/ (mr) Once the satellite reaches the desired orbit ( specified by ( Me, Wo) with it's wo " = 1 , a known physical constant ), it will stay in the orbit as long as there are no disturbances . To maintain this onebit in the presence of disturbances , control thrusts must be applied. Define small perturbations to the equilibrium solution ( orbit ) and its output , as follows : x ( t ) = x . (t ) + ( +), ult) = up ( t ) + u (t), ". . . . (c ) y ( + ) = yo + y ( t ) Then the system dynamics ( 6 ) can be linearized about the (relative ) equilibrium solution. The linearized state and output equations are obtained as follows! [ Note : this is a linearization about an orbit , i. e . , a periodic solution /O O 12 O 0 3wo * ( + ) - O 1 0 E ( t ) + 2 We D 0 0 O 0 O Wo O " (t ) O m to 1- O O O O y ( t ) = D X ( t ) . . ( d ) This six-dimensional state-space, representation of the lin- earized system is time-invariant , die , , the A, B and C atrices are constant . If the desired onbit is an elliptic one , then they will be time-varying . We note that the three matrices are all block diagonal . Thus , the LT I system ( d) can be decomposed into two uncoupled LTI systems : one involving in and O, and the other involving it. Analyzing these two parts indendently simplifies control design and analysis
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2
Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance