

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 4. Figure 4.a shows a da Vinci Xi, used in several types of robot-assisted surgery. Though it is mechanically constrained to have only
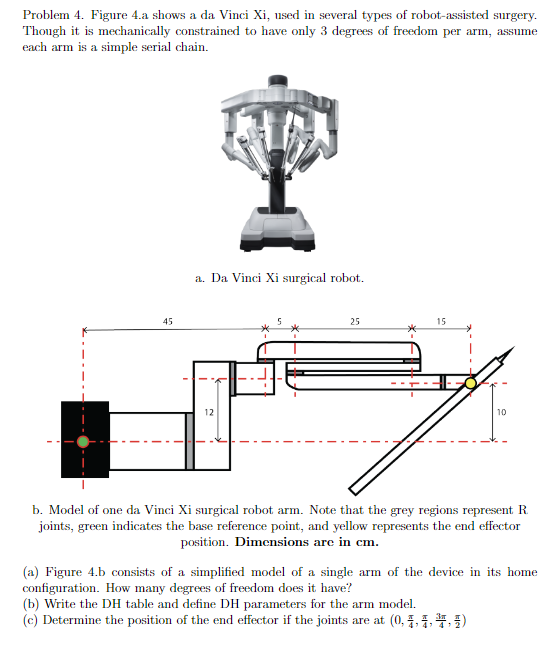
Problem 4. Figure 4.a shows a da Vinci Xi, used in several types of robot-assisted surgery. Though it is mechanically constrained to have only 3 degrees of freedom per arm, assume each arm is a simple serial chain. 45 a. Da Vinci Xi surgical robot. 12 5 25 15 10 b. Model of one da Vinci Xi surgical robot arm. Note that the grey regions represent. R. joints, green indicates the base reference point, and yellow represents the end effector position. Dimensions are in cm. (a) Figure 4.b consists of a simplified model of a single arm of the device in its home configuration. How many degrees of freedom does it have? (b) Write the DH table and define DH parameters for the arm model. (c) Determine the position of the end effector if the joints are at (0, 1, 4,,1)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516