

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 5 q 92 Do n as Figure 5.: A Vehicle with independent front and back wheel steering Figure 5 above shows a vehicle
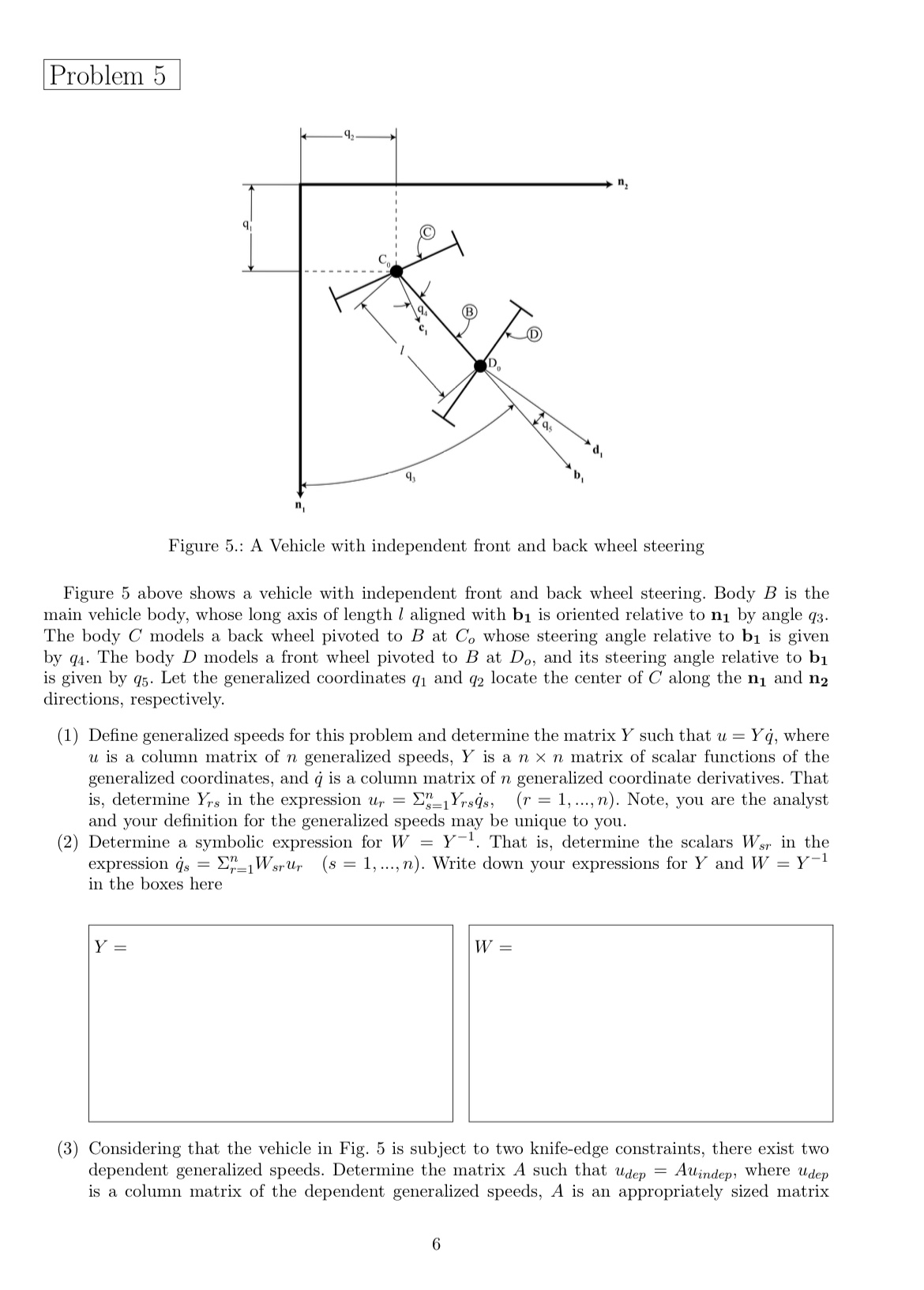

Problem 5 q 92 Do n as Figure 5.: A Vehicle with independent front and back wheel steering Figure 5 above shows a vehicle with independent front and back wheel steering. Body B is the main vehicle body, whose long axis of length aligned with b is oriented relative to n by angle q3. The body C models a back wheel pivoted to B at Co whose steering angle relative to b is given by q4. The body D models a front wheel pivoted to B at Do, and its steering angle relative to b is given by q5. Let the generalized coordinates q and q2 locate the center of C along the n and n directions, respectively. (1) Define generalized speeds for this problem and determine the matrix Y such that u = Yq, where u is a column matrix of n generalized speeds, Y is a n x n matrix of scalar functions of the generalized coordinates, and is a column matrix of n generalized coordinate derivatives. That is, determine Yrs in the expression ur = Yrss, (r = 1,, n). Note, you are the analyst and your definition for the generalized speeds may be unique to you. (2) Determine a symbolic expression for W expression qs = in the boxes here = Y. That is, determine the scalars Wer in the Wsrur (s = 1,..., n). Write down your expressions for Y and W = Y-1 Y = W = (3) Considering that the vehicle in Fig. 5 is subject to two knife-edge constraints, there exist two dependent generalized speeds. Determine the matrix A such that dep = Auindep, where Udep is a column matrix of the dependent generalized speeds, A is an appropriately sized matrix 6 of scalar functions of the generalized coordinates, and indep is a column matrix of the in- dependent generalized speeds. That is, determine the scalar functions Ars in the expression Up = ==1 Arsus, (r p1,..., n), where p = nm is the number of independent gen- eralized speeds, n is the number of generalized coordinates, and m is the number of motion constraints. Write your matrix A in the box below A = (4) Fill in the table of partial velocities below. Tildes over a vector indicate the constrained velocity or angular velocity. You may copy the table row and column headings to a table of your own with more space if you like. r= 1 2 r= 3 r= 4 r= 5 NWB Co Do NB 7
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Materials Science and Engineering An Integrated Approach
Authors: David G. Rethwisch
4th Edition
1118214226, 1118061608, 9781118214220, 978-1118061602