

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
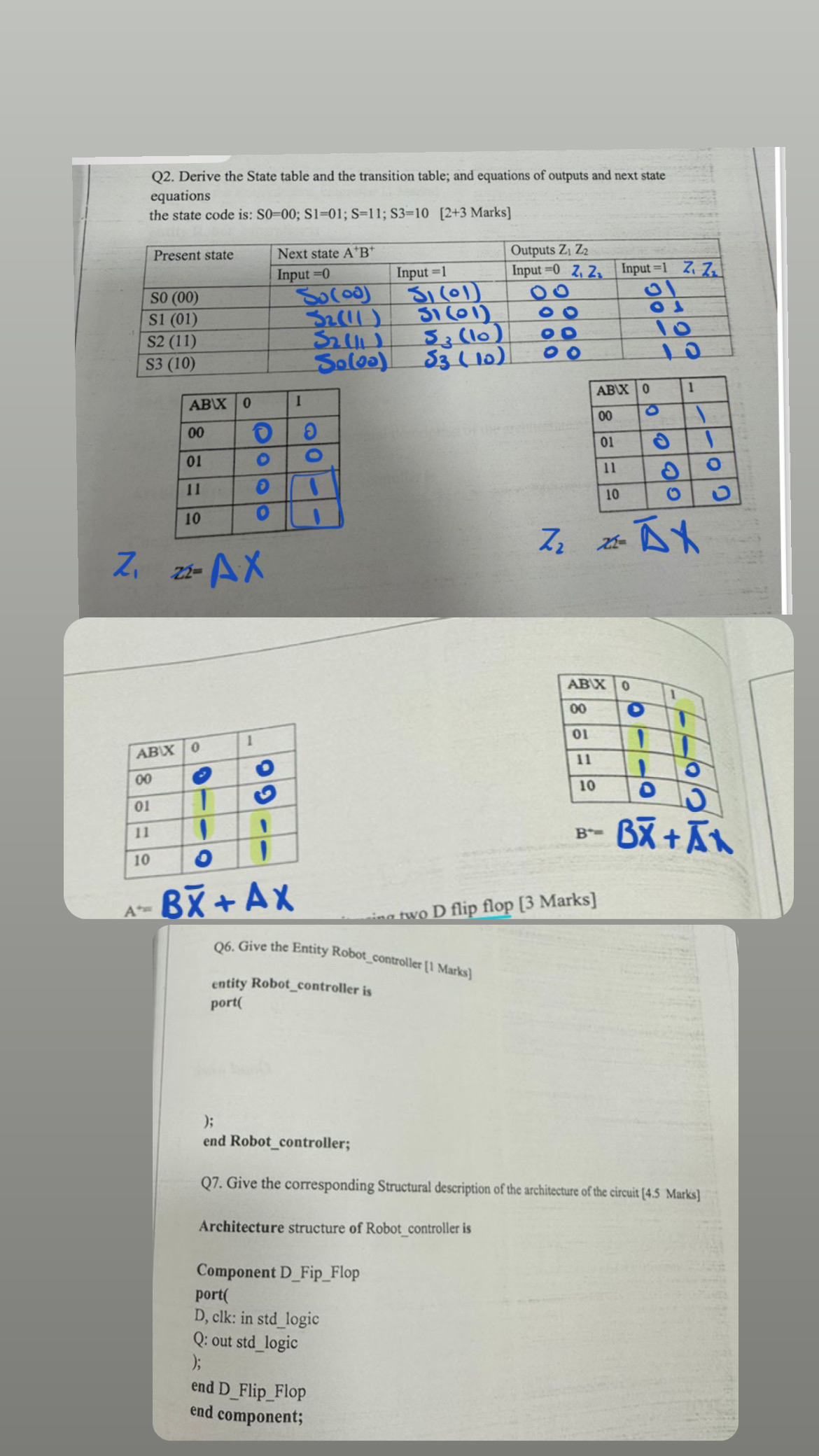
Problem statement: The robot is to manoeuver by turning whenever it comes in contact with an obstacle. A sensor is placed on the front of
Problem statement: The robot is to manoeuver by turning whenever it comes in contact with an obstacle. A sensor is placed on the front of the robot gives an output when it's in contact with an obstacle. The robot has two control lines which turn the robot to the left, and which turn the robot to the right. When it encounters an obstacle, the robot should turn right until no obstacle is detected. The next time an obstacle is detected, the robot should turn left until the obstacle is cleared, and so on
The objective is to design the robot controller. The control algorithm is:
Start;
IF obstacle detected
Solve the Question in the photo and this please :
Qimplement the corresponding circuit using two D flip flop
Qgive the dataflow dexcription of a D flip flop
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elasticsearch 8 For Developers A Beginners Guide To Indexing Analyzing Searching And Aggregating Data
Authors: Anurag Srivastava
2nd Edition
9355519826, 978-9355519825