

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
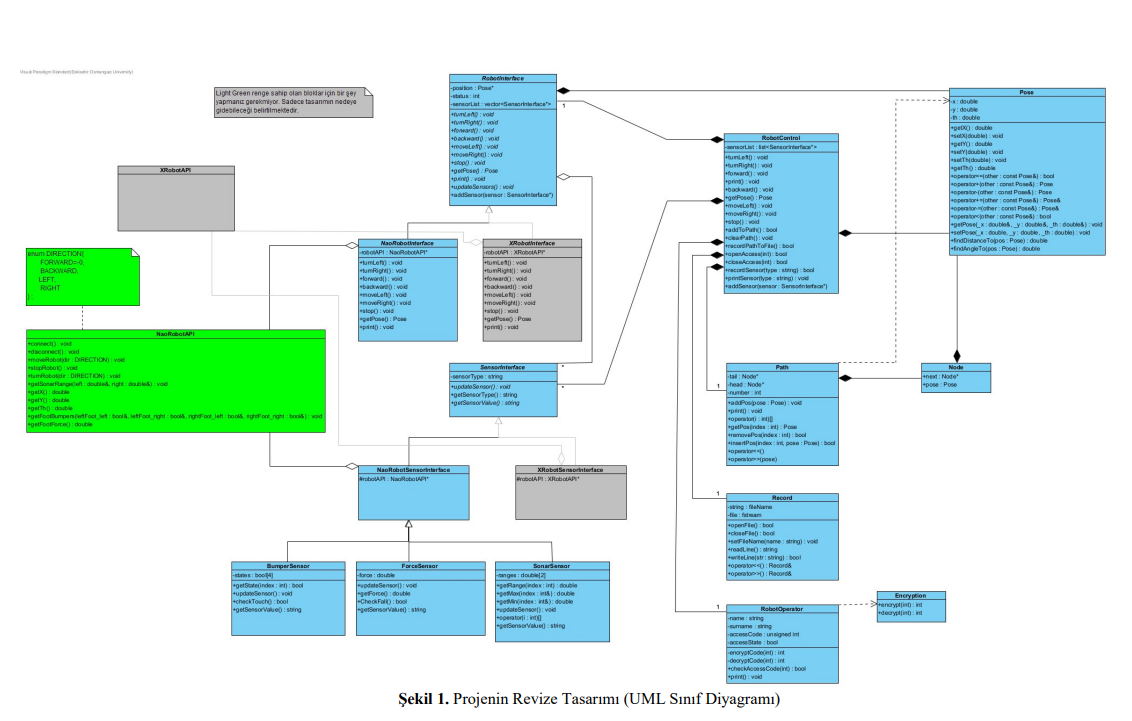
Proje A klamas : lk a amada yaz lan s n flar , ekil 1 de verilen UML S n f diyagram na g re
Proje Aklamas:
lk aamada yazlan snflarekil de verilen UML Snf diyagramna gre revize edilecektir.
Yaplacak deiiklikler aada aklanmakta olup, verilen tasarmda eksik olan ya da elien durumlar
sizler tarafndan giderilecektir.
Gri renkte verilen bloklar iin bir ey yapmayacaksnz Bu ksmlar size, sadece yazlmn farkl
bir robot platformu iin gelitirildiinde ekleme yaplacak ksmlar gstermektedir Yeni
tasarmda grld gibi, yeni robotlarn da yazlma dahil edilmesinde soyutlama yaplmaktadr
RobotControl ve NaoRobotAPI arasna RobotInterface adnda bir snf eklenmitir
RobotInterface abstract bir snf olup, NaoRobotAPI ile dorudan ilikili olan
NaoRobotInterface iin bir arayz oluturmaktadr Bylece farkl bir robota ait bir API ya
da ayn robota ait farkl bir API kullanldnda RobotInterface snfndan miras alan baka
bir snf eklenecektir. Bu eklentiden, yazlmmzn geri kalan etkilenmeyecektir.
RobotInterface abstract snfna sensorList yesi eklenmitir addSensor ye
fonksiyonu ile sensrlerin adresleri bu listeye eklenmektedir. updateSensorsye
fonksiyonu arldnda listeye eklenen tm sensr nesnelerinin updateSensor fonksiyonlar
arlmak suretiyle tm sensr verilerinin tek bir yerden gncellenmesi mmkn olabilmektedir.
SonarSensor, BumperSensor ve ForceSensor snflar
NaoRobotSensorInterface snf altnda toplanmtr NaoRobotSensorInterface
snf da SensorInterface abstract snf altndadr Yeni bir robot iin tanml sensrler
olduunda onlarda SensorInterface altnda eklenecektir. Sensr snflar arasna iki yeni
snf eklenmitir Bunlar getSensorTypeve getSensorValue snflardr
getSensorTypefonksiyonu sensr tipini string olarak dndrmektedir rnein
sonarbumberforce etc. getSensorValue fonksiyonu ait olduu sensrn
verilerini string olarak dndrmektedir rnein force sensr iin kgf sonar iin
m m vb
RobotControl snf robotla ilgili ilemleri RobotInterface ve SensorInterface
zerinden iletecektir Bunun yannda yeni fonksiyonlarda eklenmitir Bunlar;
o addToPath fonksiyonu, robotun bulunduu konum pose pathe eklenmektedir.
Path nesnesi kullanlarak
o clearPath fonksiyonu ile, path temizlenmektedir. Yani eklenen tm konumlar
silinmektedir Path nesnesi kullanlarak
o recordPath fonksiyonu ile, Path nesnesinde yklenmi olan konumlar dosyaya
yazdrlmaktadrPath ve Record nesneleri kullanlarak
o openAccess fonksiyonu, eriim iin kullanlmaktadr Bu fonksiyon zerinden doru
ifre giri yaplmad takdirde, RobotControl snfnn hibir fonksiyonu bir ilem
yapmayacaktr Tm fonksiyonlar arldnda ilem yapmadan dnecektir Bu fonksiyon
kullanlarak doru ifre verildi ise, tm ye fonksiyonlar yapmas gereken ilemi
yapacaktrRobotControl snf altna bir boolean deiken tanmlaypifrenin
girilipgirilmediine gre truefalse yaplp tm fonksiyonlarn bu deikeni kontrol
etmesi salanabilir
o closeAccess fonksiyonu ile doru ifre verildiinde eriim tekrar kapatlacaktr
Tekrar alana kadar fonksiyonlar ilemlerini yapmayacaktr
o recordSensortype: string fonksiyonu, type parametresi ile verilen tipteki
sensr sensorList listesinden bulup, o sensrn getSensorValue
fonksiyonunu armak suretiyle elde edilen veriyi dosyaya kaydedecektir.
o printSensortype: string fonksiyonu, type parametresi ile verilen tipteki
sensr sensorList listesinden bulup, o sensrn getSensorValue
fonksiyonunu armak suretiyle elde edilen veriyi ekrana dkecektir
Path, Record, Node, Pose ve RobotOperator snflarnda bir deiiklik olmamakla
birlikte, bu snflarn RobotControl ile balantlar UML tasarmda verilen formda
ilikilendirmeler ile yaplacaktr
SensorInterface.cpp SensorInterface.h ktphanesi ve uyf
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Programming The Perl DBI Database Programming With Perl
Authors: Tim Bunce, Alligator Descartes
1st Edition
1565926994, 978-1565926998