

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
(Quadrotor Control) The translational dynamics of a quadrotor can be modeled as my(t) = -by(t) + mgo(t) J(t) = b(t) + u(t) f1 2
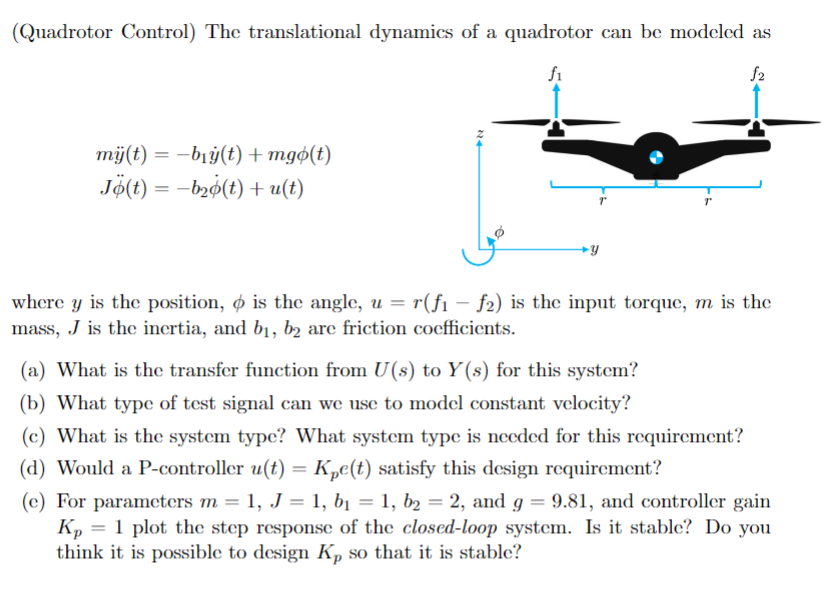
(Quadrotor Control) The translational dynamics of a quadrotor can be modeled as my(t) = -by(t) + mgo(t) J(t) = b(t) + u(t) f1 2 where y is the position, is the angle, u = r(fi -f2) is the input torque, m is the mass, J is the inertia, and b1, b2 are friction coefficients. (a) What is the transfer function from U(s) to Y(s) for this system? (b) What type of test signal can we use to model constant velocity? (c) What is the system type? What system type is needed for this requirement? (d) Would a P-controller u(t) = Kpe(t) satisfy this design requirement? (e) For parameters m = 1, J = 1, b = 1, b2 = 2, and 9 = 9.81, and controller gain Kp 1 plot the step response of the closed-loop system. Is it stable? Do you think it is possible to design Kp so that it is stable?
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Engineering Mechanics Statics
Authors: R. C. Hibbeler
12th Edition
136077900, 978-0136077909