

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Question A1. Consider a robot arm with three degrees of freedom shown in Figure QA1. (a) Assign the co-ordinate frames based on the Denavit-Hartenberg
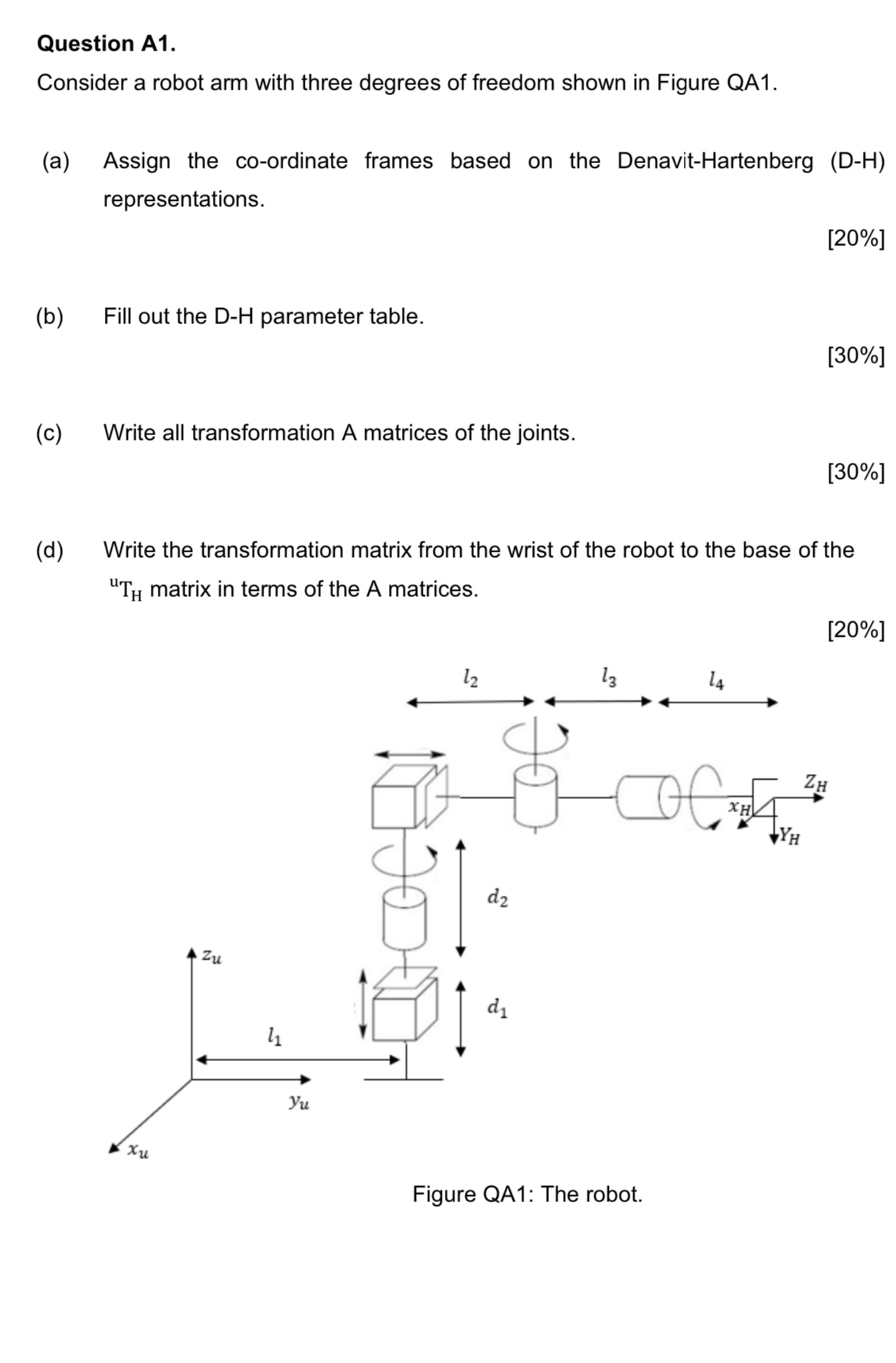
Question A1. Consider a robot arm with three degrees of freedom shown in Figure QA1. (a) Assign the co-ordinate frames based on the Denavit-Hartenberg (D-H) representations. (b) Fill out the D-H parameter table. (c) Write all transformation A matrices of the joints. [20%] [30%] [30%] (d) Write the transformation matrix from the wrist of the robot to the base of the "T matrix in terms of the A matrices. xu Zu 12 13 d2 li d Yu ZH XH YH Figure QA1: The robot. [20%]
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Probability And Statistics For Engineering And The Sciences
Authors: Jay L. Devore
9th Edition
1305251806, 978-1305251809