

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
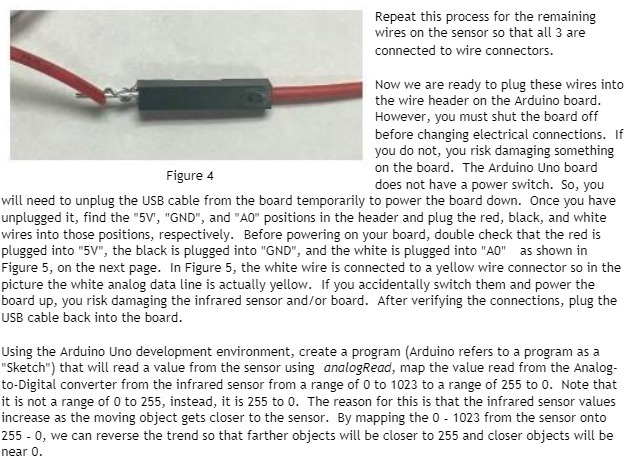
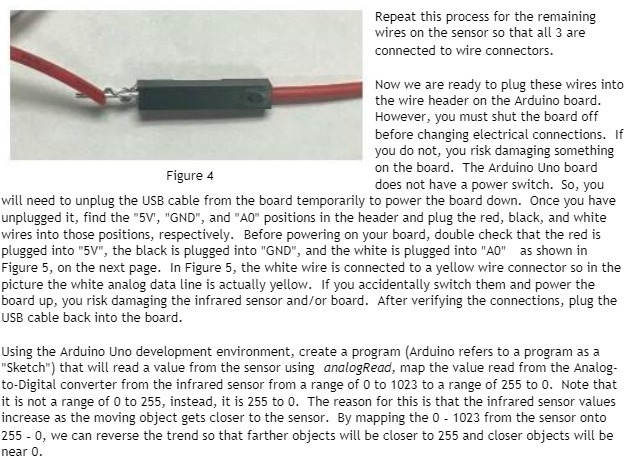
Repeat this process for the remaining wires on the sensor so that all 3 are connected to wire connectors. Now we are ready to plug
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Particle Physics
Authors: Brian R. Martin, Graham Shaw
4th Edition
1118912164, 1118912160, 978-1-118-9119, 978-1118912164