

Answered step by step
Verified Expert Solution
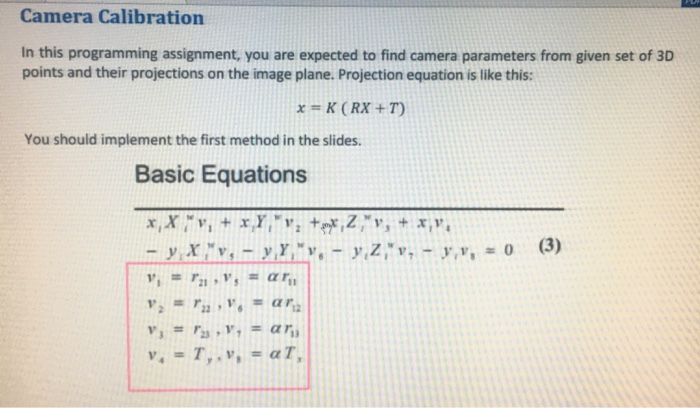
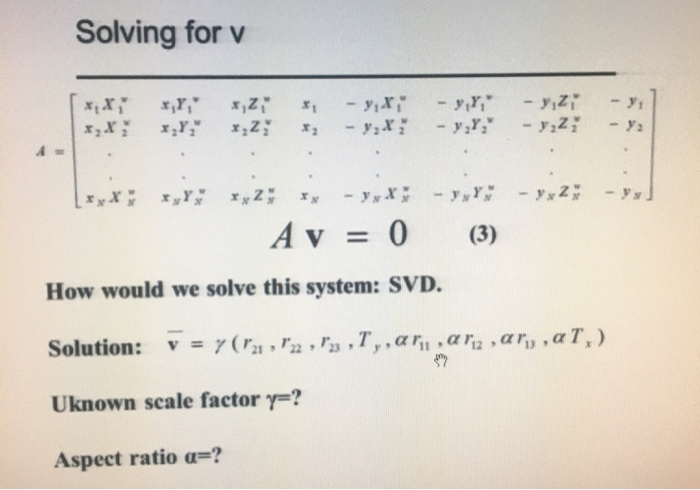
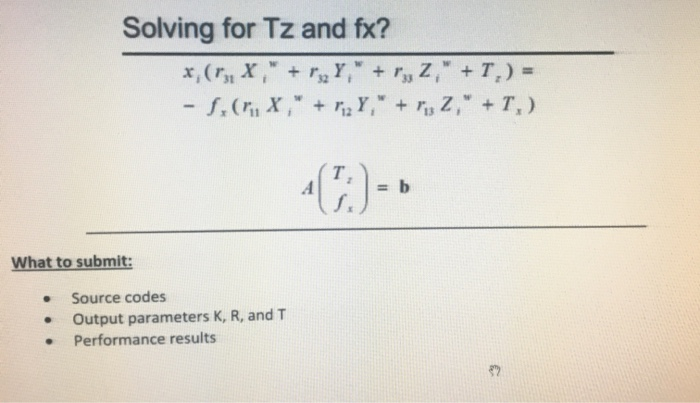
Question
1 Approved Answer
required matlab code P = [ 75.1267 25.5095 50.5957 69.9077 89.0903 95.9291 54.7216 13.8624 14.9294 25.7508 84.0717 25.4282 81.4285 24.3525 92.9264 34.9984 19.6595 25.1084 61.6045
required matlab code
P = [
75.1267 25.5095 50.5957
69.9077 89.0903 95.9291
54.7216 13.8624 14.9294
25.7508 84.0717 25.4282
81.4285 24.3525 92.9264
34.9984 19.6595 25.1084
61.6045 47.3289 35.1660
83.0829 58.5264 54.9724
91.7194 28.5839 75.7200
75.3729 38.0446 56.7822
7.5854 5.3950 53.0798
77.9167 93.4011 12.9906
56.8824 46.9391 1.1902
33.7123 16.2182 79.4285
31.1215 52.8533 16.5649
60.1982 26.2971 65.4079
68.9215 74.8152 45.0542
8.3821 22.8977 91.3337
15.2378 82.5817 53.8342
99.6135 7.8176 44.2678 ];
p = 1.0e+04 * [
0.0847 0.0129
0.0245 0.0035
0.1846 0.0405
0.0191 0.0064
0.0646 0.0020
0.0638 0.0092
0.0450 0.0109
0.0431 0.0100
0.0782 0.0086
0.0572 0.0093
0.0461 -0.0049
0.0287 0.0142
0.0533 0.0211
0.0451 -0.0032
0.0302 0.0087
0.0567 0.0040
0.0307 0.0089
0.0293 -0.0050
0.0176 0.0029
-1.2160 -0.2156 ];
R = [
0.7472 0.0401 0.6634
0.5417 0.5417 -0.6428
-0.3851 0.8396 0.3830 ];
T= [ 120
10
13];
alpha = 1;
f = 100;
K=[ f 0 0;
0 f 0;
0 0 1];
x = p(:,1);
y = p(:,2);
X = P(:,1);
Y = P(:,2);
Z = P(:,3);
% A v = 0 solve it with SVD
% x => x(*,1)
% y => x(*,2) etc.
% A = [ x*X x*Y x*Z x -y*X -y*Y -y*Y -y ];
A = [ x.*X x.*Y x.*Z x -y.*X -y.*Y -y.*Z -y]
[ U D V] = svd(A);
v = V(:,end);
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Sales Audit The Sales Managers Playbook For Getting Control Of The Selling Cycle And Improving Results
Authors: Corey Hutchison
1st Edition
0595421342, 978-0595421343