

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Robot modelling 1 . Identify the configuration of the robot given in Fig . 1 and solve for inverse kinematics using the DH convention. (
Robot modelling Identify the configuration of the robot given in Fig and solve for inverse kinematics using the DH convention. points Fig. Identify the configuration of the robot given in Fig and solve for inverse kinematics using the DH convention. points Fig For the Cylindrical robot with spherical wrist given in Fig find the transformation matrix using the DH convention. pointsQ The mobile robot given in Fig. reached its current location from the origin of world frame
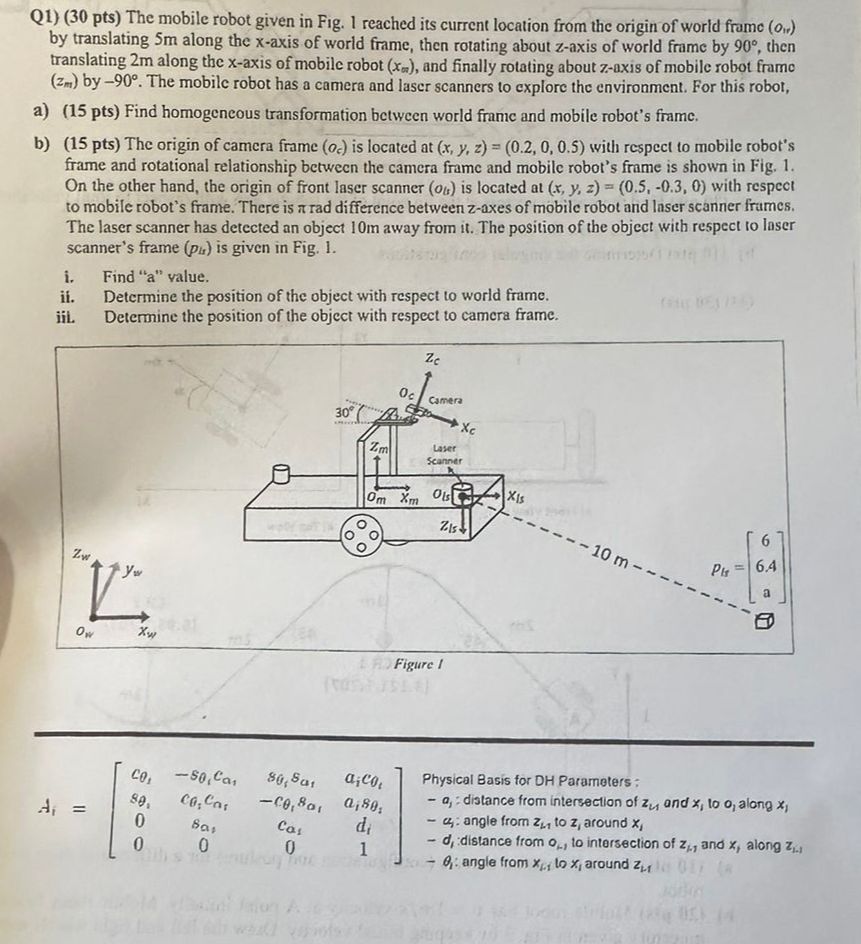
by translating along the axis of world frame, then rotating about axis of world frame by then
translating along the axis of mobile robot and finally rotating about zaxis of mobile robot framo
by The mobile robot has a camera and laser scanners to explore the environment. For this robot,
a pts Find homogeneous transformation between world frame and mobile robot's frame.
b pts The origin of camera frame is located at with respect to mobile robot's
frame and rotational relationship between the camera frame and mobile robot's frame is shown in Fig.
On the other hand, the origin of front laser scanner is located at with respect
to mobile robot's frame. There is rad difference between axes of mobile robot and laser scanner frames.
The laser scanner has detected an object away from it The position of the object with respect to laser
scanner's frame is given in Fig.
i Find a value.
ii Determine the position of the object with respect to world frame.
iil. Determine the position of the object with respect to camera frame.
Figure I
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Professional Visual Basic 6 Databases
Authors: Charles Williams
1st Edition
1861002025, 978-1861002020