

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
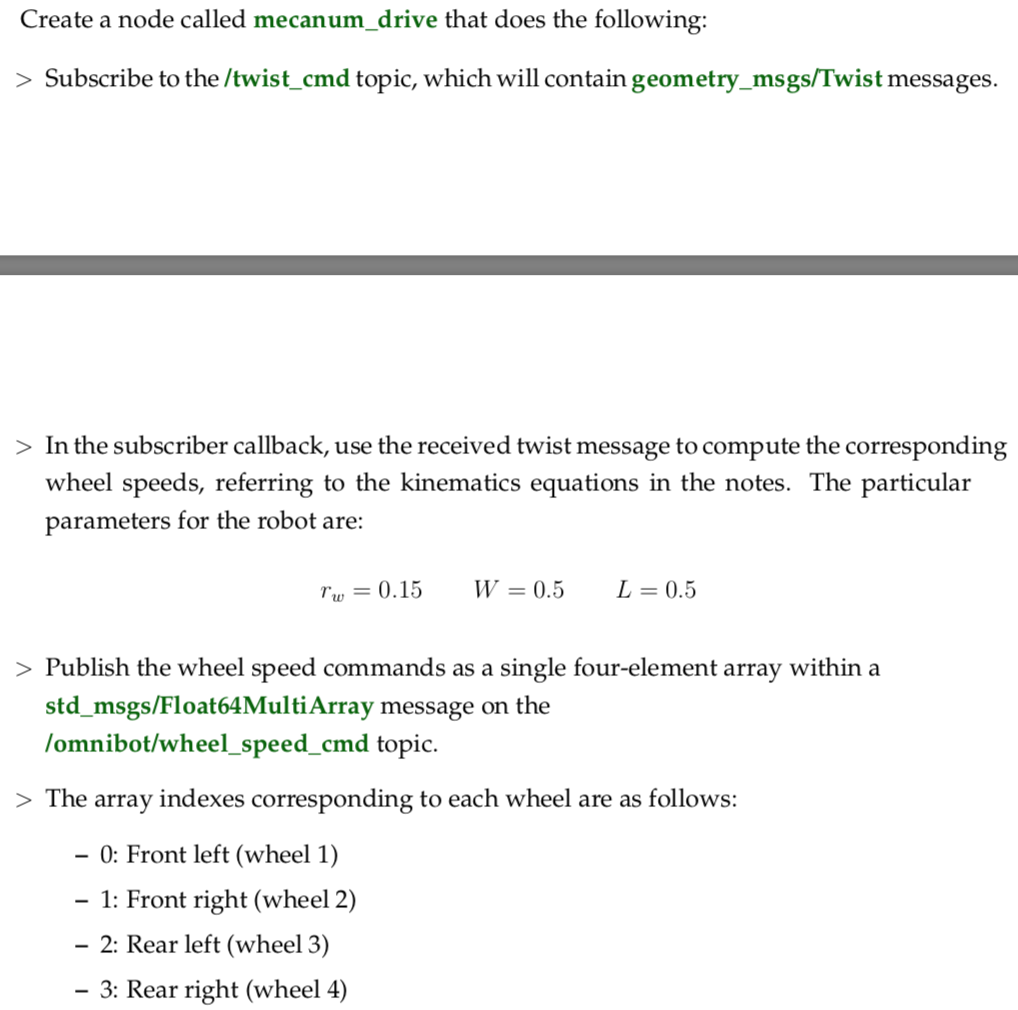
ROS code mecanum Create a node called mecanum_drive that does the following: > Subscribe to the /twist_cmd topic, which will contain geometry_msgs/Twist messages. > In
ROS code mecanum
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Graph Databases In Action
Authors: Dave Bechberger, Josh Perryman
1st Edition
1617296376, 978-1617296376