

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Figures 1 and 2 are two versions of the same system that consists of a pendulum, which defines a reference frame B and rotates
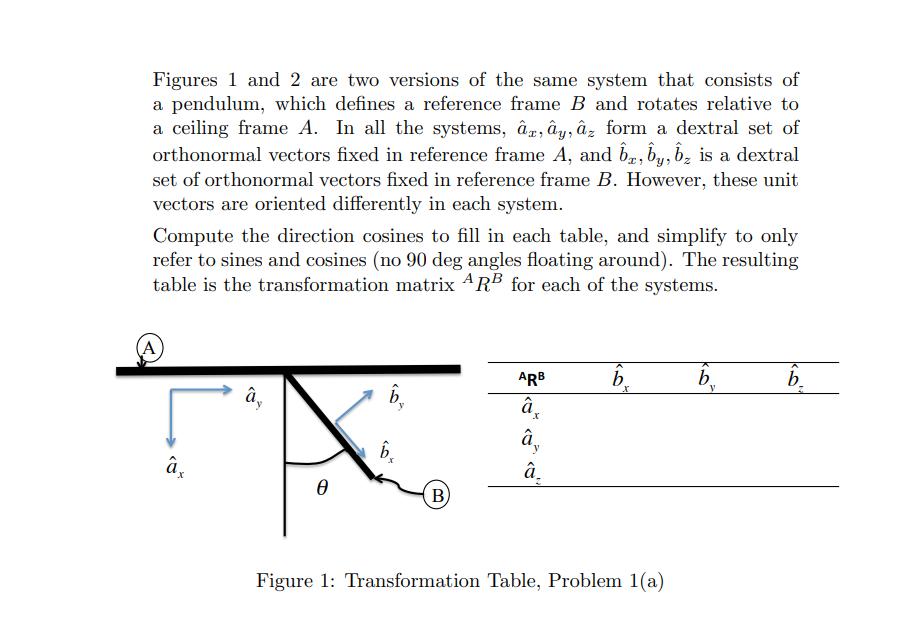
Figures 1 and 2 are two versions of the same system that consists of a pendulum, which defines a reference frame B and rotates relative to a ceiling frame A. In all the systems, r,y, z form a dextral set of orthonormal vectors fixed in reference frame A, and b, by, bz is a dextral set of orthonormal vectors fixed in reference frame B. However, these unit vectors are oriented differently in each system. Compute the direction cosines to fill in each table, and simplify to only refer to sines and cosines (no 90 deg angles floating around). The resulting table is the transformation matrix ARB for each of the systems. (A b B) ARB A b. X Figure 1: Transformation Table, Problem 1(a) A b y A b. 7
Step by Step Solution
There are 3 Steps involved in it
Step: 1
To compute the direction cosines and fill in the transformation matrix ARB for Figure 1 we need to d...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Government and Not for Profit Accounting Concepts and Practices
Authors: Michael H. Granof, Saleha B. Khumawala
6th edition
978-1-119-4958, 9781118473047, 1118155971, 1118473043, 978-1118155974