

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
silde 25 sliede 4 Question 3 1 pts An arbitrary rigid-body transformation always be expressed with four parameters (a, a, d, 0) in the form
 silde 25
silde 25 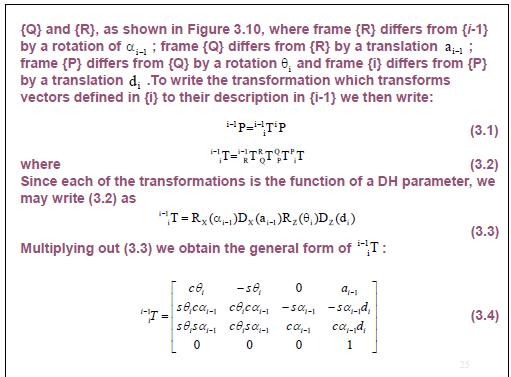
sliede 4 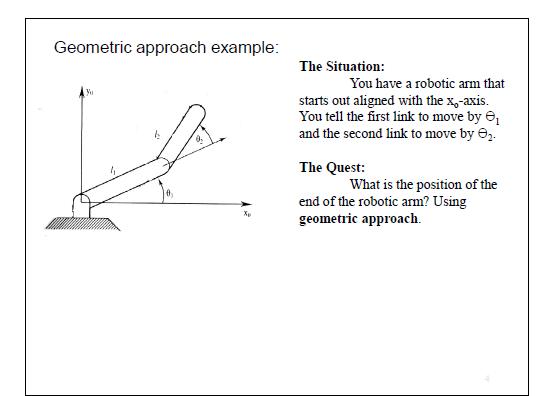
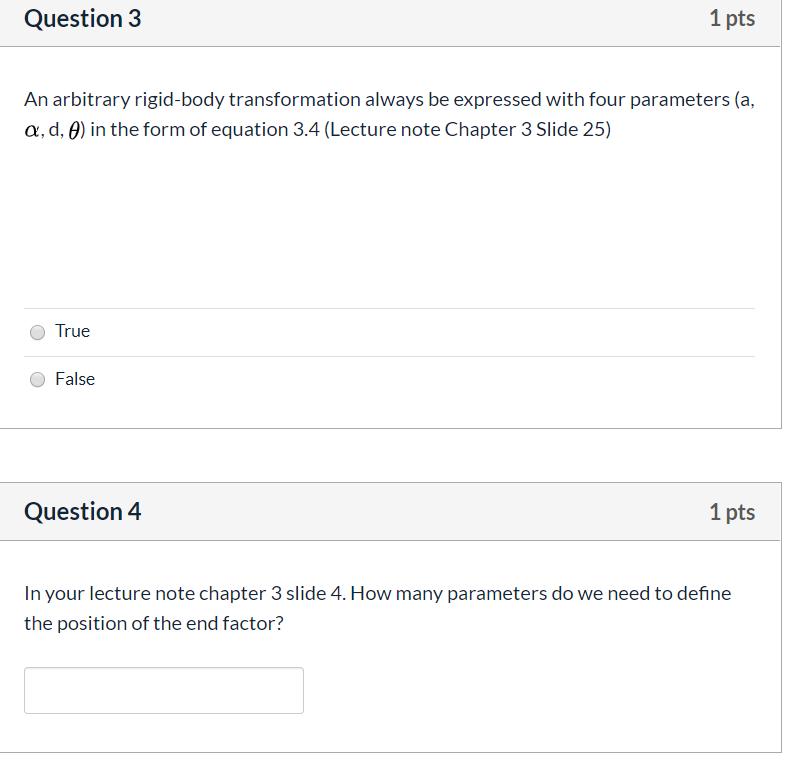
Question 3 1 pts An arbitrary rigid-body transformation always be expressed with four parameters (a, a, d, 0) in the form of equation 3.4 (Lecture note Chapter 3 Slide 25) True False Question 4 1 pts In your lecture note chapter 3 slide 4. How many parameters do we need to define the position of the end factor?
Step by Step Solution
★★★★★
3.36 Rating (162 Votes )
There are 3 Steps involved in it
Step: 1
Answer Solution Q3 An arbitrary rigidbody transformation ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Microeconomics An Intuitive Approach with Calculus
Authors: Thomas Nechyba
1st edition
538453257, 978-0538453257