

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
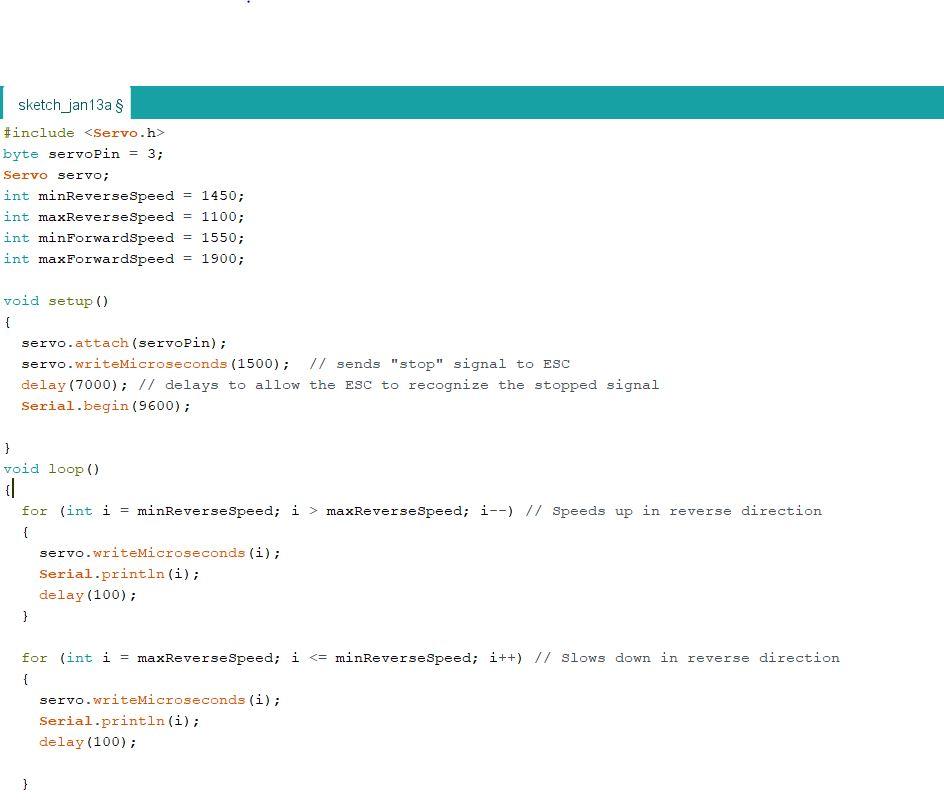
sketch jan13a #include byte servopin = 3 ; Servo servo; int minReverseSpeed =1450; int maxReverseSpeed =1100; int minforwardSpeed =1550; int maxporwardSpeed =1900; void setup() {
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle 10g Database Administrator Implementation And Administration
Authors: Gavin Powell, Carol McCullough Dieter
2nd Edition
1418836656, 9781418836658