

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
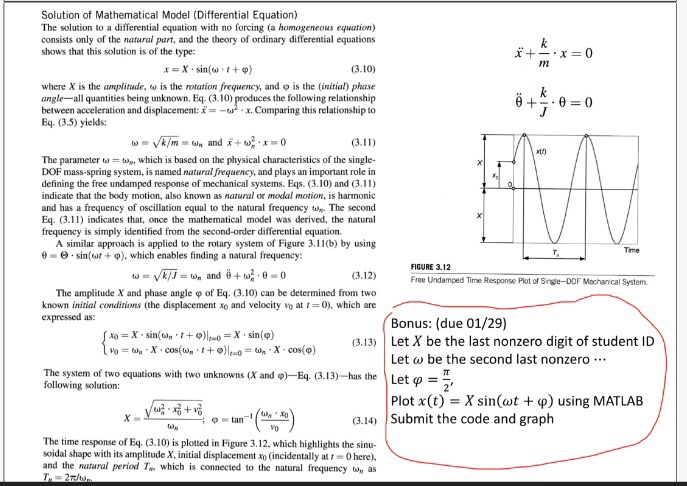
Solution of Mathematical Model (Differential Equation) The solution to a differential equation with no forcing (a homogeneous equation) consists only of the natural part, and
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Machine Learning And Knowledge Discovery In Databases European Conference Ecml Pkdd 2016 Riva Del Garda Italy September 19 23 2016 Proceedings Part 3 Lnai 9853
Authors: Bettina Berendt ,Bjorn Bringmann ,Elisa Fromont ,Gemma Garriga ,Pauli Miettinen ,Nikolaj Tatti ,Volker Tresp
1st Edition
3319461303, 978-3319461304