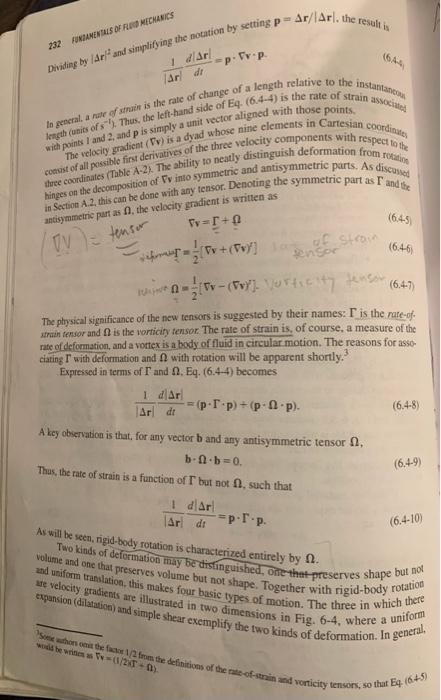
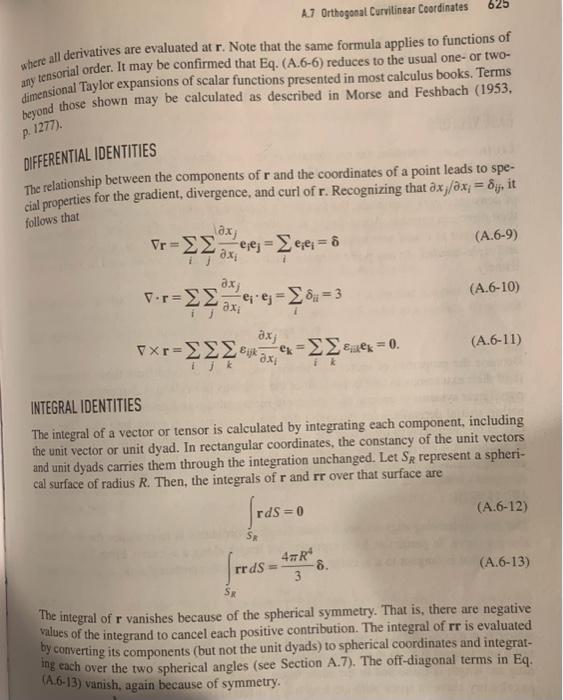
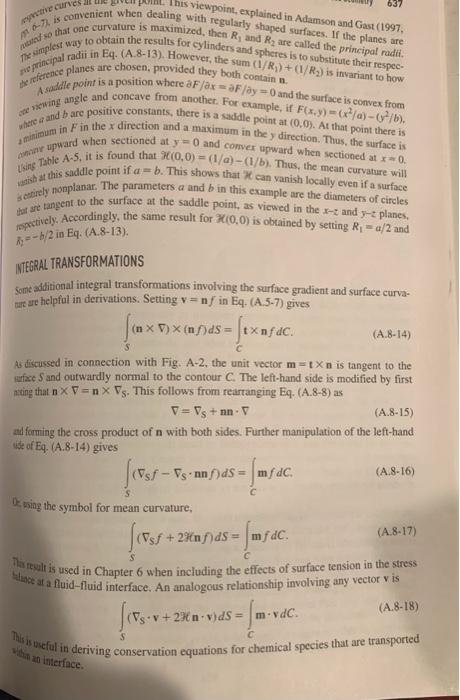
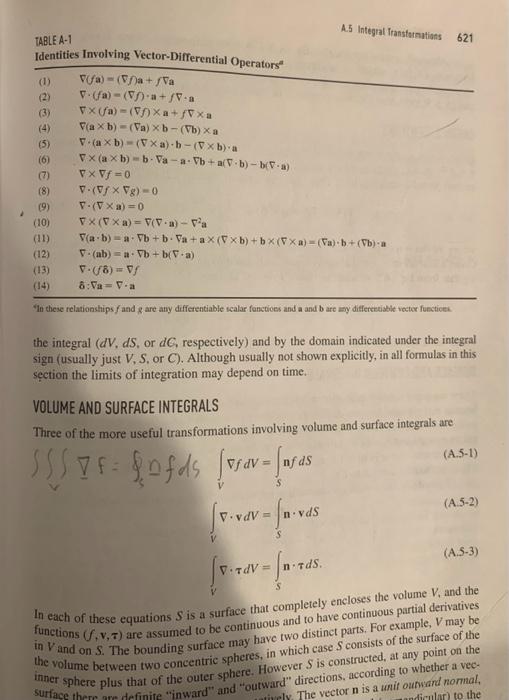
6-4. Normal Viscous Stress at a Solid Surface The objective is to show that the normal component of the viscous stress vanishes at a solid surface. This is true for solids of any shape, moving or stationary, if the fluid is incompressible, the surface is impermeable, and the no-slip condition holds. Because nn is proportional to nn, it is sufficient to prove that nn=0 under these conditions. Starting with Eq. (6.4-6) and recalling that a tensor and its transpose have the same diagonal elements, nn=nn=21n[v+(v)t]n=nvn (a) Using Eq. (A.8-15) to decompose the gradient operator into surface and normal components, the continuity equation applied at the surface is (v)S=Sv+[(nn)v]S=0 Show that the second term (that involving nn ) equals nn evaluated at the surface. (b) The combination of no slip and no penetration requires the fluid velocity in the first term in the result in part (a) to equal that of the solid. For a solid with translational velocity U and angular velocity a, the linear velocity at position r is U+(ar). Show that the surface divergence of this velocity is zero. This completes the proof that nn=0 at the surface. [Hint: Do Eq. (A.6-11) and entry (5) of Table A-1 apply to S as well as to ?] Dividisg by r2 snd sinplifying the nothtion by setting p=r/r, the result is In geceral. a nute of sminin is the rate of chunge of a length relative to the instantancoren with points 1 and 2, and p is s ( 5v ) is a dyad whose nine elements-in Cariesian coordinutey The velocily gralient derivatives of the three velocity componermation from rotation tinges on the decompocition of F inso sy tensor. Denoting the symmetric part as and the in Sertion A2, this can be done with any ccasor. Denoting the s. , the velocity gradient is written as The physical significance of the new tensors is suggested by their names: is the rate-of. wrumin eensor and is the vorticiy tensor. The rate of strain is, of course, a measure of the rate of deformation, and a vortex is a body of fluid in circular motion. The reasons for associating with deformation and with rotation will be apparent shortly. 3 Expressed in terms of and . Eq. (6.4.4) becomes r1dtdr=(pp)+(pp) A key observabion is that, for any vector b and any antisymmetric tensor , bb=0 Thas, the rate of strain is a function of but not , such that r1dtdr=pp As will be seen, rigid-body rotation is characterized entirely by . Two kinds of deformation thasy be distinguished, onte-that-preserves shape but not and unifonm transilation. preserves volume but not shape. Together with rigid-body rotation se velocity grabiemes are millikes four basic types of motion. The three in which there epansion (dilatation) and illustrated in two dimensions in Fig. 6-4, where a uniform mple shear exemplify the two kinds of deformation. In generd. where all derivatives are evaluated at r. Note that the same formula applies to functions of any tensorial order. It may be confirmed that Eq. (A.6-6) reduces to the usual one-or twodimensional Taylor expansions of scalar functions presented in most calculus books. Terms beyond those shown may be calculated as described in Morse and Feshbach (1953, p. 1277). OIFFERENTIAL IDENTITIES The relationship between the components of r and the coordinates of a point leads to special properties for the gradient, divergence, and curl of r. Recognizing that xj/xi=ij, it follows that r=ijxixjeiej=ieiei=r=ijxixjeiej=iii=3r=ijkijkxixjek=ikijek=0 INTEGRAL IDENTITIES The integral of a vector or tensor is calculated by integrating each component, including the unit vector or unit dyad. In rectangular coordinates, the constancy of the unit vectors and unit dyads carries them through the integration unchanged. Let SR represent a spherical surface of radius R. Then, the integrals of r and rr over that surface are SRrdS=0SRrrdS=34R4. The integral of r vanishes because of the spherical symmetry. That is, there are negative values of the integrand to cancel each positive contribution. The integral of rr is evaluated by converting its components (but not the unit dyads) to spherical coordinates and integrating each over the two spherical angles (see Section A.7). The off-diagonal terms in Eq. (A.6-13) vanish, again because of symmetry. 6.7. is convenient when dealing with regularly shained in Adamson and Gast (1997, suta so that one curvature is maximized, then R1 and R2 are called the principal radii. mefrincepal planes are chosen, provided they both (1/R1)+(1/R2) is invariant to how A saclle point is a position where F/x=F/y=0 and the surface is convex from an wing angle and concave from another. For example, if F(x,y)=(x2/a)(y2/b). where a and b are positive constants, there is a sadidle point at (0,0). At that point there is an miripuuar in ward when sectioned at y=0 and comver up direction. Thus, the surface is ts ising rable A5, it is found that (0,0)=(1/a)(1/b). Thus, the mean curvature will tsing tabt this saddle point if a=b. This shows that H can vanish locally even if a surface secericly nonplanar. The parameters a and b in this example are the diameters of circles war are tangent to the surface at the saddle point, as viewed in the xz and yz planes, 1=b/2 in Eq. (A.8-13). INTGGALL TRANSFORMATIONS Some additional integral transformations involving the surface gradient and surface curvature se helpful in derivations. Setting v=nf in Eq. (A.5-7) gives S(n)(nf)dS=CtnfdC As discussed in connection with Fig. A-2, the unit vector m=tn is tangent to the peffe S and outwardly normal to the contour C. The left-hand side is modified by first noing that n=nS. This follows from reartanging Eq. (A.8-8) as =S+nn adforming the cross product of n with both sides. Further manipulation of the left-hand she of Eq. (A.8-14) gives S(SfSnnf)dS=CmfdC 0. wing the symbol for mean curvature, S(Sf+2H(nf)dS=CmfdC. Thartyalt is used in Chapter 6 when including the effects of surface tension in the stress Whoce af a fluid-fluid interface. An analogess relationship involving any vector v is S(Sv+2%nv)dS=CmvdC This is vieful in deriving eonservation equations for chemical species that are transported TABLEA-1 A.5. Integnal iransterations 621 Identities Involving Vector-Differential Operators the integral (dV,dS, or dC, respectively) and by the domain indicated under the integral sign (usually just V,S, or C ). Although usually not shown explicitly, in all formulas in this section the limits of integration may depend on time. VOLUME AND SURFACE INTEGRALS Three of the more useful transformations involving volume and surface integrals are (Vf=fVfdV=SnfdSVvdV=SnvdSVdV=SndS In each of these equations S is a surface that completely encloses the volume V, and the functions (f,v,) are assumed to be continuous and to have continuous partial derivatives in V and on S. The bounding surface may have two distinct parts. For example, V may be the volume between two concentric spheres, in which case S consists of the surface of the inner sphere plus that of the outer sphere. However S is constructed, at any point on the surface there pius that of the outer sphere. Fiowever S is constactir tound directions, according to whether a vec- 6-4. Normal Viscous Stress at a Solid Surface The objective is to show that the normal component of the viscous stress vanishes at a solid surface. This is true for solids of any shape, moving or stationary, if the fluid is incompressible, the surface is impermeable, and the no-slip condition holds. Because nn is proportional to nn, it is sufficient to prove that nn=0 under these conditions. Starting with Eq. (6.4-6) and recalling that a tensor and its transpose have the same diagonal elements, nn=nn=21n[v+(v)t]n=nvn (a) Using Eq. (A.8-15) to decompose the gradient operator into surface and normal components, the continuity equation applied at the surface is (v)S=Sv+[(nn)v]S=0 Show that the second term (that involving nn ) equals nn evaluated at the surface. (b) The combination of no slip and no penetration requires the fluid velocity in the first term in the result in part (a) to equal that of the solid. For a solid with translational velocity U and angular velocity a, the linear velocity at position r is U+(ar). Show that the surface divergence of this velocity is zero. This completes the proof that nn=0 at the surface. [Hint: Do Eq. (A.6-11) and entry (5) of Table A-1 apply to S as well as to ?] Dividisg by r2 snd sinplifying the nothtion by setting p=r/r, the result is In geceral. a nute of sminin is the rate of chunge of a length relative to the instantancoren with points 1 and 2, and p is s ( 5v ) is a dyad whose nine elements-in Cariesian coordinutey The velocily gralient derivatives of the three velocity componermation from rotation tinges on the decompocition of F inso sy tensor. Denoting the symmetric part as and the in Sertion A2, this can be done with any ccasor. Denoting the s. , the velocity gradient is written as The physical significance of the new tensors is suggested by their names: is the rate-of. wrumin eensor and is the vorticiy tensor. The rate of strain is, of course, a measure of the rate of deformation, and a vortex is a body of fluid in circular motion. The reasons for associating with deformation and with rotation will be apparent shortly. 3 Expressed in terms of and . Eq. (6.4.4) becomes r1dtdr=(pp)+(pp) A key observabion is that, for any vector b and any antisymmetric tensor , bb=0 Thas, the rate of strain is a function of but not , such that r1dtdr=pp As will be seen, rigid-body rotation is characterized entirely by . Two kinds of deformation thasy be distinguished, onte-that-preserves shape but not and unifonm transilation. preserves volume but not shape. Together with rigid-body rotation se velocity grabiemes are millikes four basic types of motion. The three in which there epansion (dilatation) and illustrated in two dimensions in Fig. 6-4, where a uniform mple shear exemplify the two kinds of deformation. In generd. where all derivatives are evaluated at r. Note that the same formula applies to functions of any tensorial order. It may be confirmed that Eq. (A.6-6) reduces to the usual one-or twodimensional Taylor expansions of scalar functions presented in most calculus books. Terms beyond those shown may be calculated as described in Morse and Feshbach (1953, p. 1277). OIFFERENTIAL IDENTITIES The relationship between the components of r and the coordinates of a point leads to special properties for the gradient, divergence, and curl of r. Recognizing that xj/xi=ij, it follows that r=ijxixjeiej=ieiei=r=ijxixjeiej=iii=3r=ijkijkxixjek=ikijek=0 INTEGRAL IDENTITIES The integral of a vector or tensor is calculated by integrating each component, including the unit vector or unit dyad. In rectangular coordinates, the constancy of the unit vectors and unit dyads carries them through the integration unchanged. Let SR represent a spherical surface of radius R. Then, the integrals of r and rr over that surface are SRrdS=0SRrrdS=34R4. The integral of r vanishes because of the spherical symmetry. That is, there are negative values of the integrand to cancel each positive contribution. The integral of rr is evaluated by converting its components (but not the unit dyads) to spherical coordinates and integrating each over the two spherical angles (see Section A.7). The off-diagonal terms in Eq. (A.6-13) vanish, again because of symmetry. 6.7. is convenient when dealing with regularly shained in Adamson and Gast (1997, suta so that one curvature is maximized, then R1 and R2 are called the principal radii. mefrincepal planes are chosen, provided they both (1/R1)+(1/R2) is invariant to how A saclle point is a position where F/x=F/y=0 and the surface is convex from an wing angle and concave from another. For example, if F(x,y)=(x2/a)(y2/b). where a and b are positive constants, there is a sadidle point at (0,0). At that point there is an miripuuar in ward when sectioned at y=0 and comver up direction. Thus, the surface is ts ising rable A5, it is found that (0,0)=(1/a)(1/b). Thus, the mean curvature will tsing tabt this saddle point if a=b. This shows that H can vanish locally even if a surface secericly nonplanar. The parameters a and b in this example are the diameters of circles war are tangent to the surface at the saddle point, as viewed in the xz and yz planes, 1=b/2 in Eq. (A.8-13). INTGGALL TRANSFORMATIONS Some additional integral transformations involving the surface gradient and surface curvature se helpful in derivations. Setting v=nf in Eq. (A.5-7) gives S(n)(nf)dS=CtnfdC As discussed in connection with Fig. A-2, the unit vector m=tn is tangent to the peffe S and outwardly normal to the contour C. The left-hand side is modified by first noing that n=nS. This follows from reartanging Eq. (A.8-8) as =S+nn adforming the cross product of n with both sides. Further manipulation of the left-hand she of Eq. (A.8-14) gives S(SfSnnf)dS=CmfdC 0. wing the symbol for mean curvature, S(Sf+2H(nf)dS=CmfdC. Thartyalt is used in Chapter 6 when including the effects of surface tension in the stress Whoce af a fluid-fluid interface. An analogess relationship involving any vector v is S(Sv+2%nv)dS=CmvdC This is vieful in deriving eonservation equations for chemical species that are transported TABLEA-1 A.5. Integnal iransterations 621 Identities Involving Vector-Differential Operators the integral (dV,dS, or dC, respectively) and by the domain indicated under the integral sign (usually just V,S, or C ). Although usually not shown explicitly, in all formulas in this section the limits of integration may depend on time. VOLUME AND SURFACE INTEGRALS Three of the more useful transformations involving volume and surface integrals are (Vf=fVfdV=SnfdSVvdV=SnvdSVdV=SndS In each of these equations S is a surface that completely encloses the volume V, and the functions (f,v,) are assumed to be continuous and to have continuous partial derivatives in V and on S. The bounding surface may have two distinct parts. For example, V may be the volume between two concentric spheres, in which case S consists of the surface of the inner sphere plus that of the outer sphere. However S is constructed, at any point on the surface there pius that of the outer sphere. Fiowever S is constactir tound directions, according to whether a vec