

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Task2: Complete the Solution for Forward Kinematics according to following method and show step by step calculations clearly (4 Marks) The homogeneous transform can
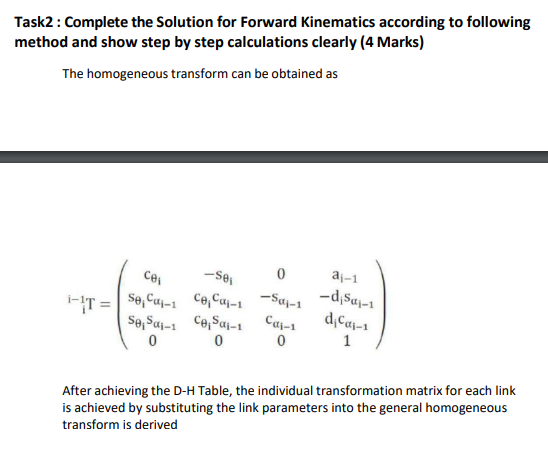
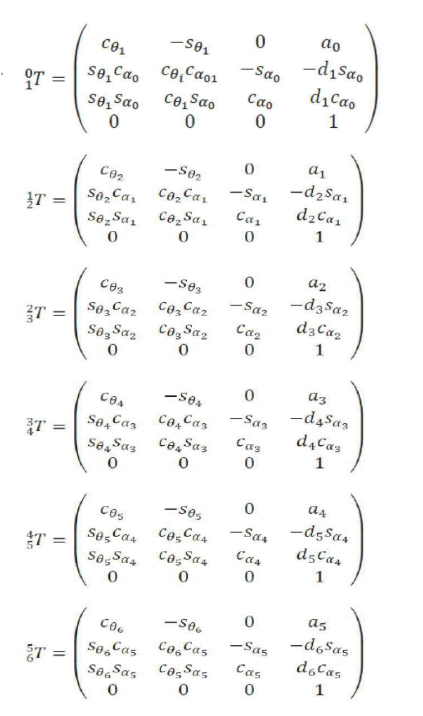
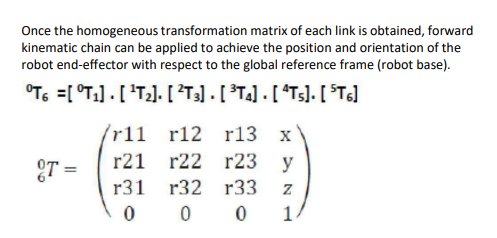
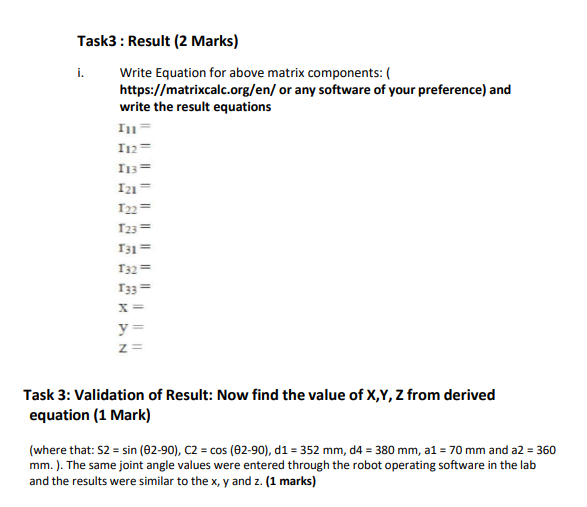
Task2: Complete the Solution for Forward Kinematics according to following method and show step by step calculations clearly (4 Marks) The homogeneous transform can be obtained as (**). -T= Ce,Caj-1 Se, Caj-1 Se, Sa-1 CS-1 -Saj-1 Caj-1 aj-1 -disaj-1 dj caj-1 After achieving the D-H Table, the individual transformation matrix for each link is achieved by substituting the link parameters into the general homogeneous transform is derived IT T 3T 37 45 T = = = || T = C0 Sai Cao SeiSao 0 CO2 S0 Ca Sz Sa C03 S03 Caz S03 Saz COA S04 Cas S04 S3 COS Cas 505S4 Ses CO S06 Cas S06 Sas 0 -501 Ce,C01 Co So 0 -S0 CozCas Co Sa 0 -503 CO3 Caz C03 Saz 0 -50% C01Ca3 COS3 0 -505 Ces C4 Co S4 -506 Co Cas Cos Sas 0 0 Sao Cao 0 0 -Sas Cas 0 0 -Sz Caz 0 0 -Sas Cas 0 0 -S4 CA 0 0 -Sas Cas 0 ao -disao di Cao 1 a1 -dsa dca 1 az -d3sz d3ca 1 a3 -d4sas d4 Cas 1 as -d5S4 dscas 1 as -dosas do Cas 1 Once the homogeneous transformation matrix of each link is obtained, forward kinematic chain can be applied to achieve the position and orientation of the robot end-effector with respect to the global reference frame (robot base). T6 =[T] [T] [T3]. [ T4] [ 4T5]. [T6] T= /r11 r12 r13 x r21 r22 r23 y r31 r32 r33 Z 000 1 Task3: Result (2 Marks) i. Write Equation for above matrix components: ( https://matrixcalc.org/en/ or any software of your preference) and write the result equations III I12= I13= 1217 122 T23= 131= T32= 133= X= y = z = Task 3: Validation of Result: Now find the value of X,Y, Z from derived equation (1 Mark) (where that: S2 = sin (02-90), C2 = cos (82-90), d1 = 352 mm, d4 = 380 mm, a1 = 70 mm and a2 = 360 mm.). The same joint angle values were entered through the robot operating software in the lab and the results were similar to the x, y and z. (1 marks)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Differential Equations and Linear Algebra
Authors: Jerry Farlow, James E. Hall, Jean Marie McDill, Beverly H. West
2nd edition
131860615, 978-0131860612