

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
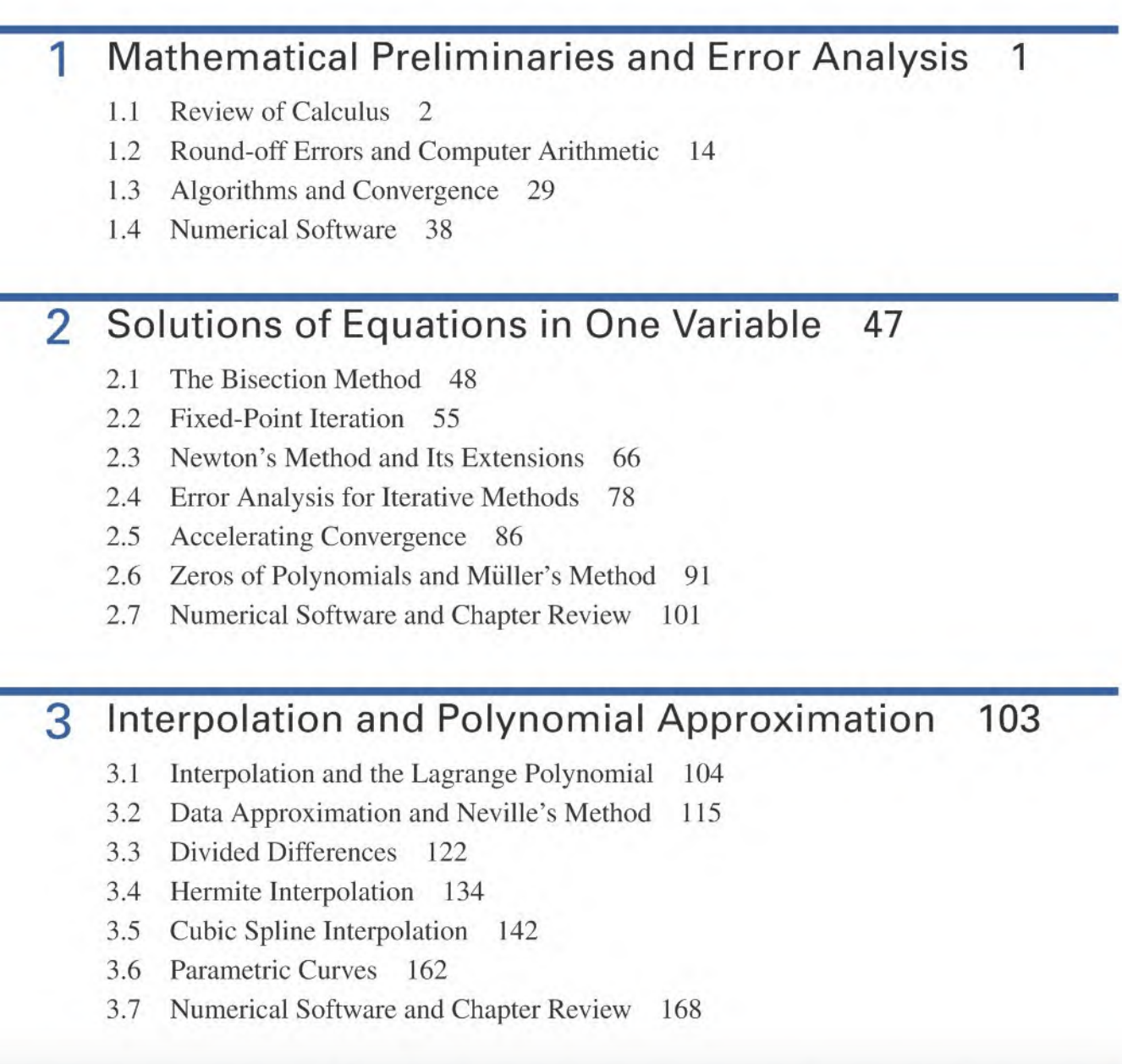
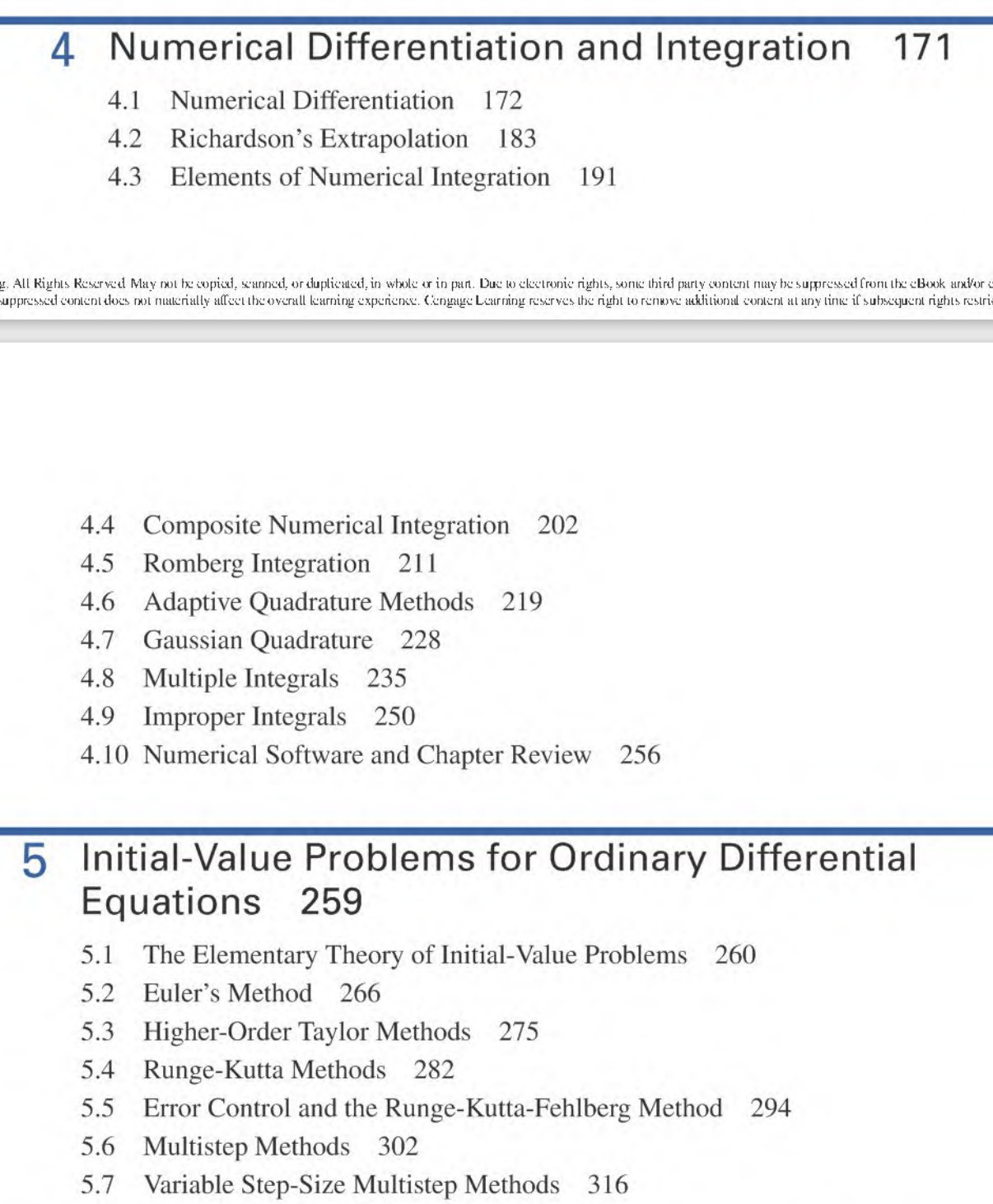
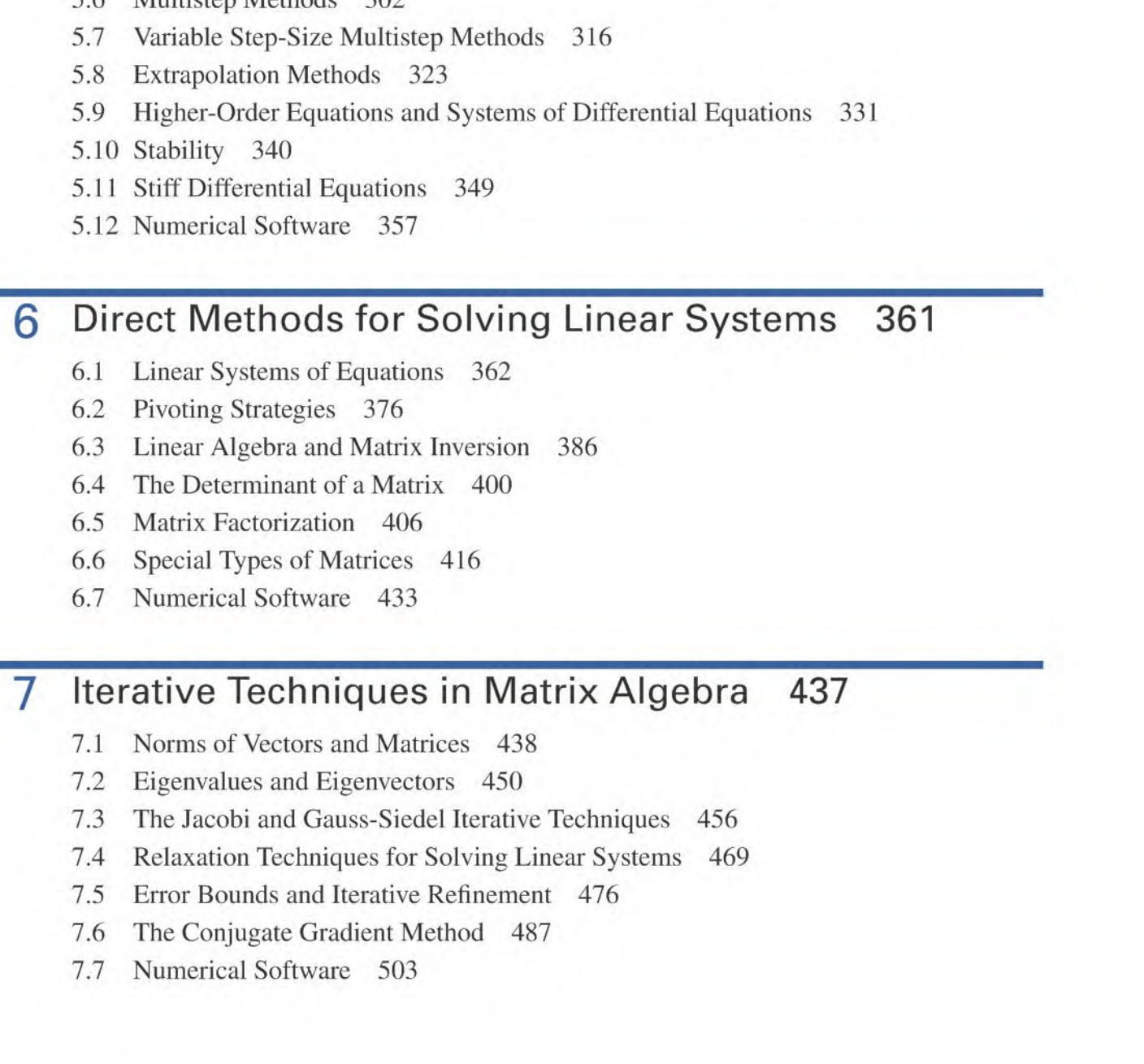
TESTED SECTIONS: Chapter 1: Sections 2.3. Chapter 2: Sections 1.23.4.5. Method of False position is net tested. Steensen's Method is not tesed. Chapter 3: Sections
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Complex Survey Data Analysis With SAS
Authors: Taylor H Lewis
1st Edition
1498776809, 9781498776806