

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The Figure 2 shows a two link planar RR robot using MKS units. The links have negligible mass and inertia, but the joint motors
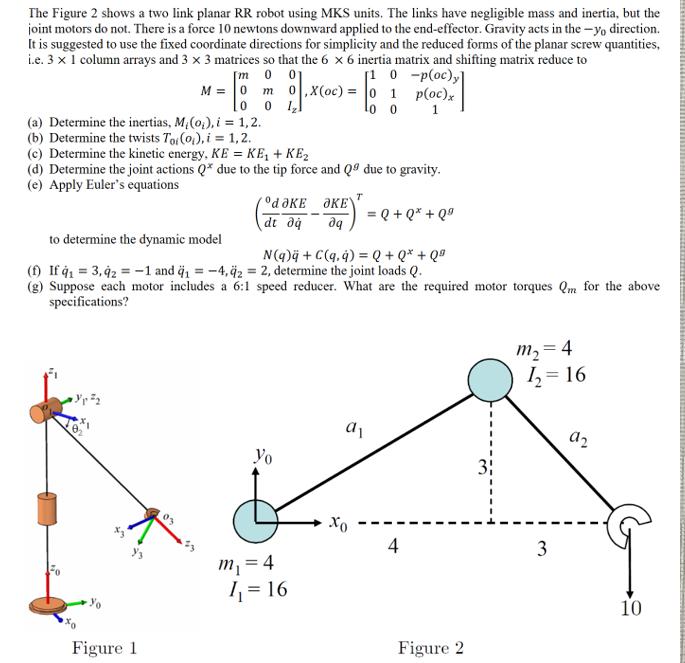
The Figure 2 shows a two link planar RR robot using MKS units. The links have negligible mass and inertia, but the joint motors do not. There is a force 10 newtons downward applied to the end-effector. Gravity acts in the-yo direction. It is suggested to use the fixed coordinate directions for simplicity and the reduced forms of the planar screw quantities, i.e. 3 x 1 column arrays and 3 x 3 matrices so that the 6 X 6 inertia matrix and shifting matrix reduce to [m 0 0 M = 0 m 0 0 11 [10p(oc)y] p(oc)x 1 (a) Determine the inertias, M.(o,), i = 1,2. (b) Determine the twists Toi (0), i = 1,2. (c) Determine the kinetic energy, KE = KE + KE (d) Determine the joint actions Q* due to the tip force and Q9 due to gravity. (e) Apply Euler's equations Yp2 Figure 1 03 od OKE dt dq 0,X(oc)= 0 1 lo 0 to determine the dynamic model N(q) + C(q. q) =Q+Q* + Q (f) If q = 3,92 = -1 and = -4,42 = 2, determine the joint loads Q. (g) Suppose each motor includes a 6:1 speed reducer. What are the required motor torques Qm for the above specifications? Yo m = 4 1=16 T OKEY 9 Xo =Q+Q* + Q 4 Figure 2 m=4 12=16 3 92 10
Step by Step Solution
There are 3 Steps involved in it
Step: 1
To solve this problem well go step by step through each p...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516