

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
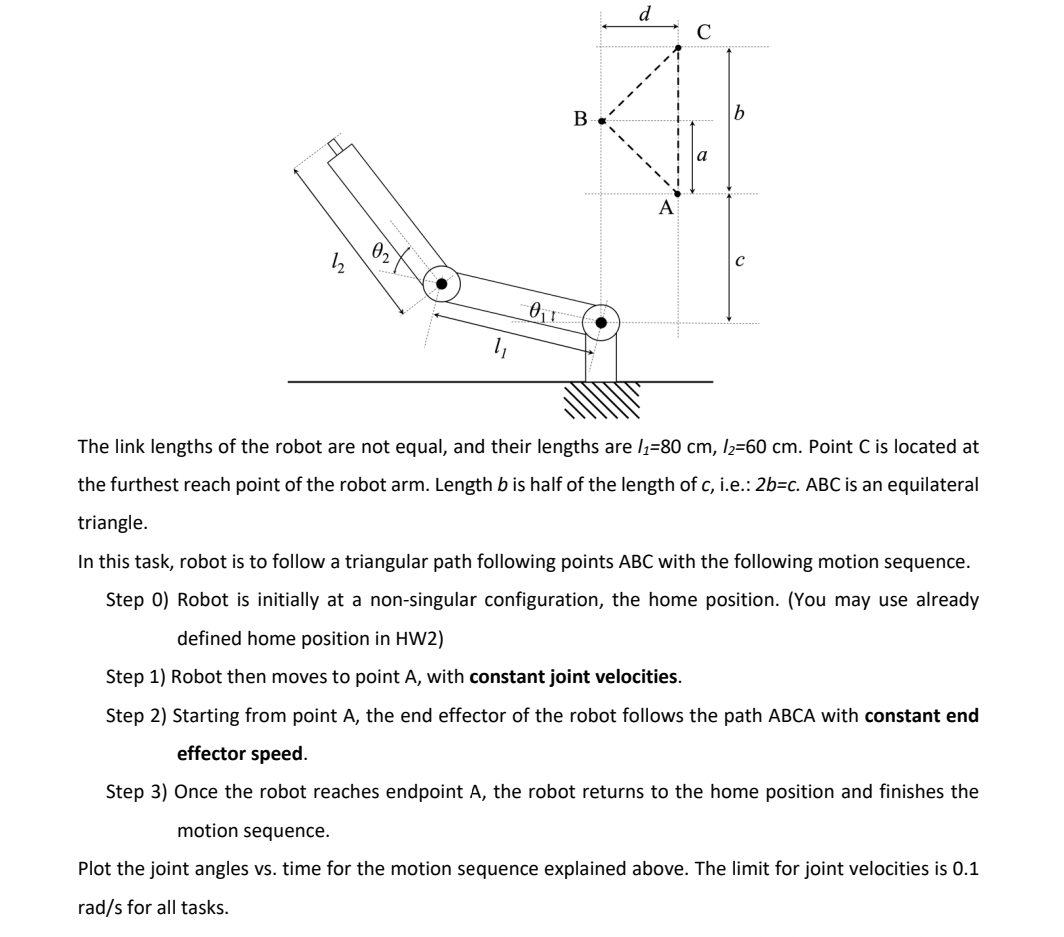
The link lengths of the robot are not equal, and their lengths are I 1 = 8 0 c m , I 2 = 6
The link lengths of the robot are not equal, and their lengths are Point is located at the furthest reach point of the robot arm. Length is half of the length of ie: ABC is an equilateral triangle.
In this task, robot is to follow a triangular path following points ABC with the following motion sequence.
Step Robot is initially at a nonsingular configuration, the home position. You may use already defined home position in HW
Step Robot then moves to point A with constant joint velocities.
Step Starting from point A the end effector of the robot follows the path ABCA with constant end effector speed.
Step Once the robot reaches endpoint A the robot returns to the home position and finishes the motion sequence.
Plot the joint angles vs time for the motion sequence explained above. The limit for joint velocities is for all tasks. PLEASE WRITE ME A MATLAB CODE THAT COVERS ALL STEPS
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Understanding Oracle APEX 5 Application Development
Authors: Edward Sciore
2nd Edition
1484209893, 9781484209899