

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The mobile manipulator of Figure 2.16 consists of a 6R arm and multi-fingered hand mounted on a mobile base with a single wheel. You
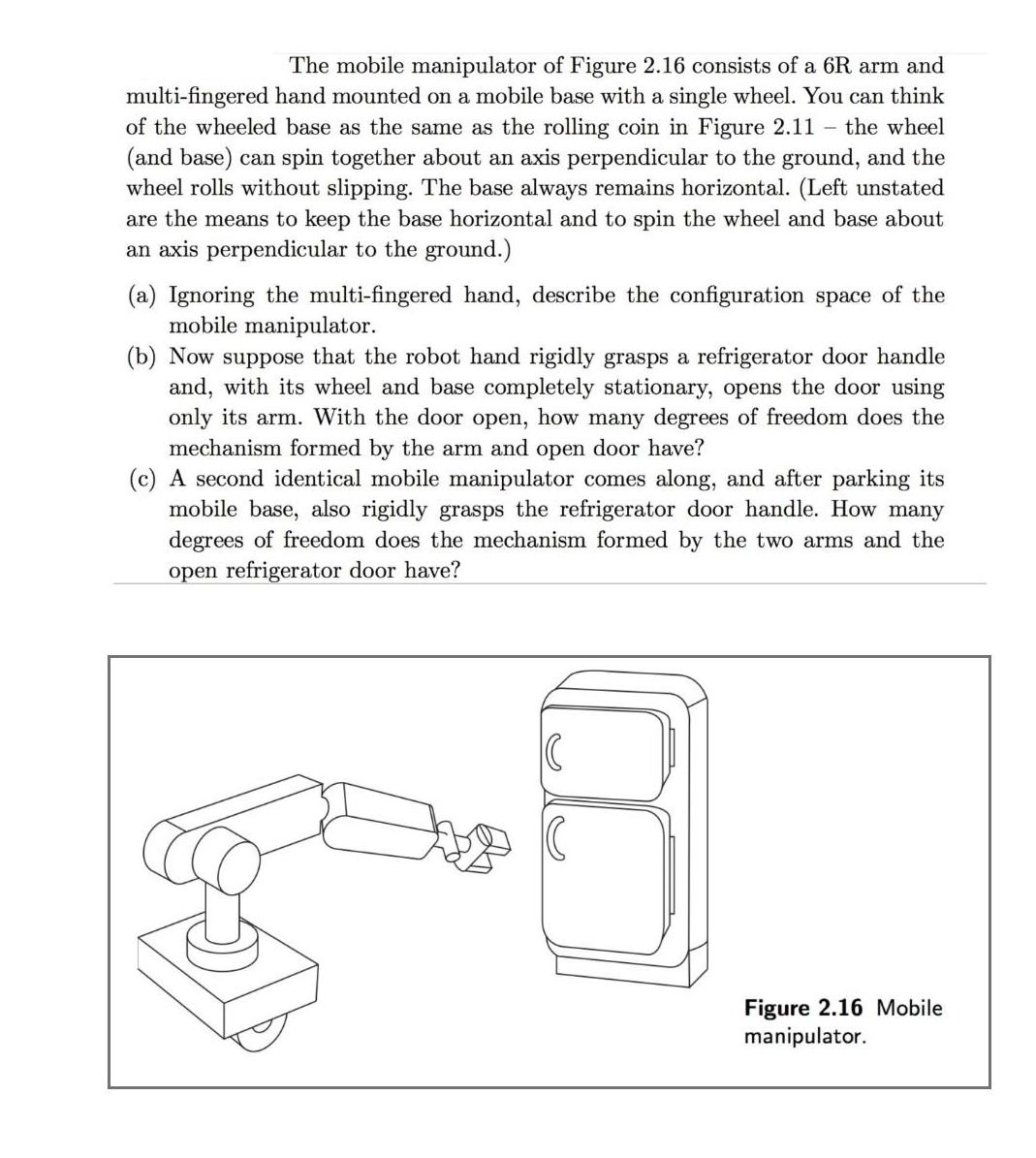
The mobile manipulator of Figure 2.16 consists of a 6R arm and multi-fingered hand mounted on a mobile base with a single wheel. You can think of the wheeled base as the same as the rolling coin in Figure 2.11 the wheel (and base) can spin together about an axis perpendicular to the ground, and the wheel rolls without slipping. The base always remains horizontal. (Left unstated are the means to keep the base horizontal and to spin the wheel and base about an axis perpendicular to the ground.) (a) Ignoring the multi-fingered hand, describe the configuration space of the mobile manipulator. (b) Now suppose that the robot hand rigidly grasps a refrigerator door handle and, with its wheel and base completely stationary, opens the door using only its arm. With the door open, how many degrees of freedom does the mechanism formed by the arm and open door have? (c) A second identical mobile manipulator comes along, and after parking its mobile base, also rigidly grasps the refrigerator door handle. How many degrees of freedom does the mechanism formed by the two arms and the open refrigerator door have? 100 Figure 2.16 Mobile manipulator.
Step by Step Solution
★★★★★
3.45 Rating (145 Votes )
There are 3 Steps involved in it
Step: 1
This question is asking us to determine the configuration space and degrees of freedom DOF for different scenarios involving a mobile manipulator and ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Operations Management Creating Value Along the Supply Chain
Authors: Roberta S. Russell, Bernard W. Taylor
7th Edition
9781118139523, 0470525908, 1118139526, 978-0470525906