

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
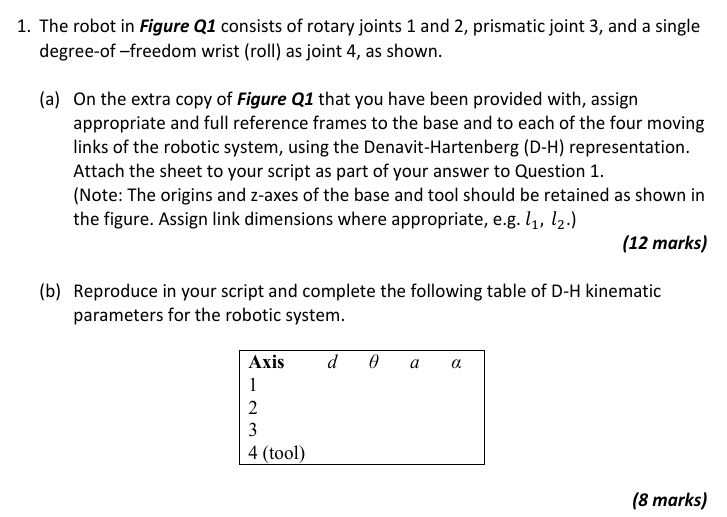
The robot in Figure Q 1 consists of rotary joints 1 and 2 , prismatic joint 3 , and a single degree - of -
The robot in Figure Q consists of rotary joints and prismatic joint and a single
degreeoffreedom wrist roll as joint as shown.
a On the extra copy of Figure Q that you have been provided with, assign
appropriate and full reference frames to the base and to each of the four moving
links of the robotic system, using the DenavitHartenberg DH representation.
Attach the sheet to your script as part of your answer to Question
Note: The origins and zaxes of the base and tool should be retained as shown in
the figure. Assign link dimensions where appropriate, eg
marks
b Reproduce in your script and complete the following table of DH kinematic
parameters for the robotic system.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Vector Mechanics for Engineers Statics and Dynamics
Authors: Ferdinand Beer, E. Russell Johnston, Jr., Elliot Eisenberg, William Clausen, David Mazurek, Phillip Cornwell
8th Edition
73212229, 978-0073212227