

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
This exercise focuses on DH parameters and the forward (position and orientation) kinematics transformation for the planar 3-DOF, 3R robot shown below. The following
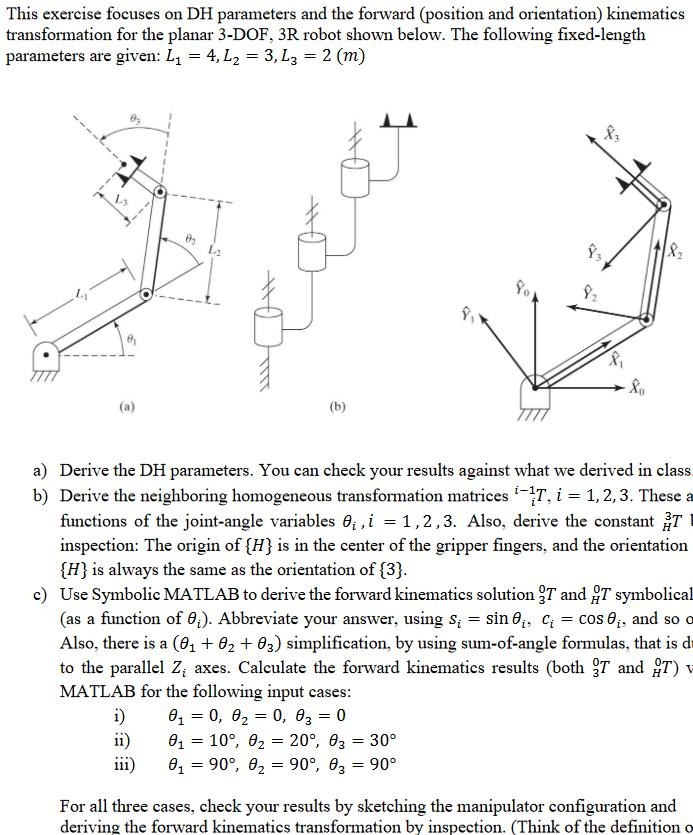
This exercise focuses on DH parameters and the forward (position and orientation) kinematics transformation for the planar 3-DOF, 3R robot shown below. The following fixed-length parameters are given: L = 4, L = 3, L3 = 2 (m) (a) 02 12 i) ii) iii) a) Derive the DH parameters. You can check your results against what we derived in class. b) Derive the neighboring homogeneous transformation matrices T, i = 1, 2, 3. These a functions of the joint-angle variables 0,i = 1,2,3. Also, derive the constant T inspection: The origin of {H} is in the center of the gripper fingers, and the orientation {H} is always the same as the orientation of {3}. c) Use Symbolic MATLAB to derive the forward kinematics solution 37 and T symbolical (as a function of 8). Abbreviate your answer, using S, = sin 0, C = cos 0, and so o Also, there is a (0 + 0 +03) simplification, by using sum-of-angle formulas, that is d to the parallel Z, axes. Calculate the forward kinematics results (both 3T and T) v MATLAB for the following input cases: (b) = 0 0,0 0, 03 = 0 = 0 10, 0 = 20, 03 = 30 0 = 90, 0 = 90, 03 = 90 For all three cases, check your results by sketching the manipulator configuration and deriving the forward kinematics transformation by inspection. (Think of the definition o
Step by Step Solution
★★★★★
3.37 Rating (150 Votes )
There are 3 Steps involved in it
Step: 1
Volution focuses bired kogth parameters are 44 4 3 ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction To Business Statistics
Authors: Ronald M. Weiers
7th Edition
978-0538452175, 538452196, 053845217X, 2900538452198, 978-1111524081