Question
this is the FSM Question 1: Fill in the missing code and upload the code to your Arduino. #include Servo myservo; enum{Idle,Degree0,Degree180}; enum{IdleDC,Forward,Backward}; int DC1
this is the FSM
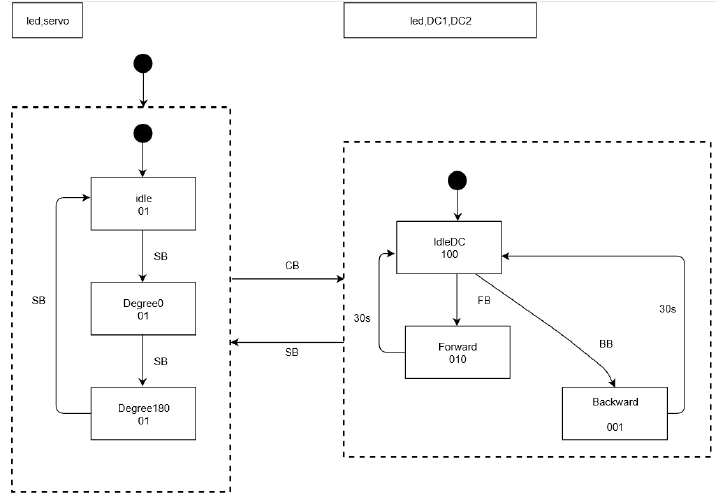
Question 1: Fill in the missing code and upload the code to your Arduino.
#include
Servo myservo;
enum{Idle,Degree0,Degree180};
enum{IdleDC,Forward,Backward};
int DC1 =9;
int DC2 =10;
int LED =8;
int SB=6;
int CB=5;
int FB=4;
int BB=3;
int current;
int currentDC;
void setup() {
Serial.begin(9600);
pinMode(DC1,OUTPUT);
pinMode(DC2,OUTPUT);
pinMode(LED,OUTPUT);
pinMode(SB,INPUT_PULLUP);
pinMode(CB,INPUT_PULLUP);
pinMode(FB,INPUT_PULLUP);
pinMode(BB,INPUT_PULLUP);
myservo.attach(11);
current=Idle;
currentDC=IdleDC;
}
void loop() {
switch(current){
case Idle:
Serial.println("Idel Servo is on");
delay(100);
digitalWrite(LED,LOW);
myservo.write(90);
delay(1000);
if (digitalRead(SB)==0){
delay(200);
current=Degree0;
}
if (digitalRead(CB)==0){
delay(200);
DCFSM();
}
break;
case Degree0:
Serial.println("0 degree Servo is on");
delay(100);
digitalWrite(LED,LOW);
myservo.write(0);
delay(15);
if (digitalRead(SB)==0){
delay(1000);
current=Degree180;
}
if(digitalRead(CB)==0){
DCFSM();
}
break;
case Degree180:
Serial.println("180 degree Servo is on");
delay(100);
digitalWrite(LED,LOW);
myservo.write(180);
delay(15);
if (digitalRead(SB)==0){
delay(100);
current=Idle;
}
if(digitalRead(CB)==0){
DCFSM();
}
break;
}
}
void DCFSM(){
while(true){
switch(currentDC){
case IdleDC:
Serial.println("LED is ON");
delay(100);
digitalWrite(DC1,LOW);
digitalWrite(DC2,LOW);
digitalWrite(LED,HIGH);
if(digitalRead(FB)==0){
currentDC=Forward;
}
if(digitalRead(BB)==0){
currentDC=Backward;
}
break;
case Forward:
Serial.println("Forward Motor is ON");
digitalWrite(LED,LOW);
digitalWrite(DC1,HIGH);
digitalWrite(DC2,LOW);
delay(3000);
currentDC=IdleDC;
break;
case Backward:
Serial.println("Backward Motor is ON");
digitalWrite(LED,LOW);
digitalWrite(DC1,LOW);
digitalWrite(DC2,HIGH);
delay(3000);
currentDC=IdleDC;
break;
}
if(digitalRead(SB)==0){
break;
}
}
}
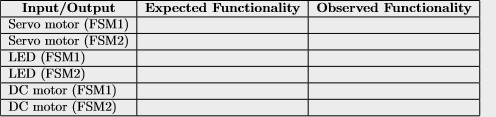
Record your results in the table below:
 Question 2: Modify the code to have the motor operating at half of its speed.
Question 2: Modify the code to have the motor operating at half of its speed.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started