

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
To better understand the dynamics of linkages, the assignment is designed to apply the theories from the mechanism module of unit EGB321 into real-world
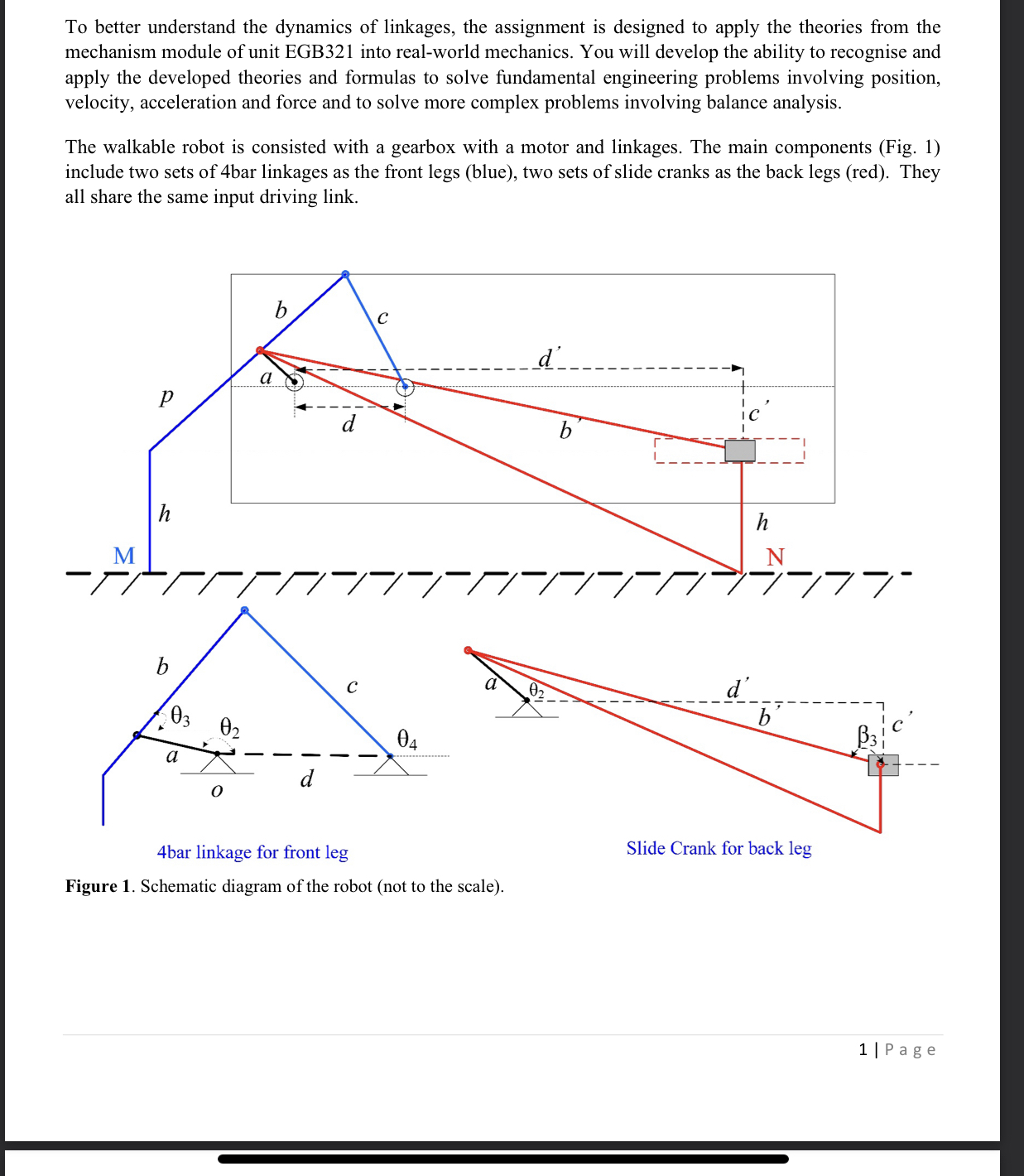
To better understand the dynamics of linkages, the assignment is designed to apply the theories from the mechanism module of unit EGB321 into real-world mechanics. You will develop the ability to recognise and apply the developed theories and formulas to solve fundamental engineering problems involving position, velocity, acceleration and force and to solve more complex problems involving balance analysis. The walkable robot is consisted with a gearbox with a motor and linkages. The main components (Fig. 1) include two sets of 4bar linkages as the front legs (blue), two sets of slide cranks as the back legs (red). They all share the same input driving link. M h b a a b d' 02 04 4bar linkage for front leg Figure 1. Schematic diagram of the robot (not to the scale). b h N d' b Slide Crank for back leg 1 | Page
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Based on the schematic diagram of the robot provided we can observe that the robot consists of two s...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Ethics for Scientists and Engineers
Authors: Edmund G. Seebauer, Robert L. Barry
1st Edition
9780195698480, 195134885, 195698487, 978-0195134889