

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
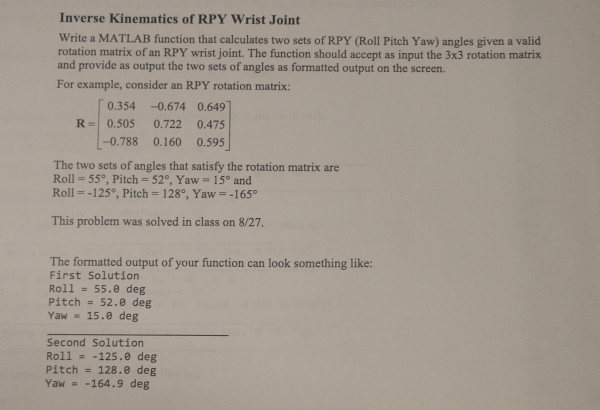
use angle=atan2(sin,cos) inorder to find the angles Inverse Kinematics of RPY Wrist Joint Write a MATLAB function that calculates two sets of RPY (Roll Pitch
use angle=atan2(sin,cos) inorder to find the angles
Inverse Kinematics of RPY Wrist Joint Write a MATLAB function that calculates two sets of RPY (Roll Pitch Yaw) angles given a valid rotation matrix of an RPY wrist joint. The function should accept as input the 3x3 rotation matrix and provide as output the two sets of angles as formatted output on the screen For example, consider an RPY rotation matrix: 0.354 -0.674 0.649 R=1 0.505 0.722 0.475 -0.788 0.160 0.595 The two sets of angles that satisfy the rotation matrix are Roll = 55, Pitch = 52, Yaw = 15 and Rol!--125, Pitch = 128, Yaw =-165 This problem was solved in class on 8/27. The formatted output of your function can look something like: First Solution Roll = 55.0 deg Pitch = 52.0 deg Yaw = 15.8 deg Second Solutiorn Roll -125.0 deg Pitch = 128.0 deg Yaw = -164.9 degStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Design Application Development And Administration
Authors: Michael V. Mannino
4th Edition
0615231047, 978-0615231044